
包阅导读总结
1. 机械臂、ESP32、小米电机、3D 打印、控制电机
2. 本文记录了制作机械臂的过程,包括缘起和思路,分阶段实现了简单运行电机、建模、3D 打印、前端控制、单片机开发等,列出已实现和未实现的目标,介绍了物料清单和各部分的关键操作,还展望了未来的进阶方向。
3.
– 缘起与思路
– 看过稚辉君的机械臂后想尝试,基于控制电机的思路制定渐进目标
– 已实现的阶段目标
– 简单运行电机
– solidworks 建模与 3D 打印
– 前端项目实现网页操作控制电机旋转
– 尝试运行单片机及相关通信协议
– 改写单片机项目实现蓝牙与 TWAI 集合
– 完善前端项目实现网页精准控制电机
– 未来的进阶目标
– 优化 3D 模型
– 引入动画系统
– 单片机改为 Rust 语言开发
– 尝试使用人工智能
– 物料清单
– 详细列举了制作机械臂所需的各种物料及价格
– 各部分操作
– 如电机连接与控制、单片机环境搭建与项目运行、前端项目的开发步骤等
思维导图:
文章地址:https://juejin.cn/post/7399530649999867938
文章来源:juejin.cn
作者:岁聿云暮
发布时间:2024/8/5 17:05
语言:中文
总字数:7974字
预计阅读时间:32分钟
评分:81分
标签:机械臂,小米电机,3D建模,单片机编程,前端开发
以下为原文内容
本内容来源于用户推荐转载,旨在分享知识与观点,如有侵权请联系删除 联系邮箱 media@ilingban.com
缘起:看过稚辉君的机械臂,备受震撼。后来小米发布了伺服电机,故想尝试一下。
思路:简单来想,机械臂的最本质就是控制电机,我们只需要让电机按照我们的预想来进行旋转就可以了。当然这只是最简单的目标。由此可以计划出以下几点渐进的目标。
已实现的阶段目标:
- 简单运行电机: 电机连接电脑,然后随便转转
- solidworks建模部分: 用3d建模软件画出3d模型
- 3d打印部分: 找淘宝商家打印出3d模型,验证下是否可以安装
- 前端项目篇部分: 使用threejs + vue3做个类似数字孪生,简单点说就是网页操作控制电机旋转
- 尝试运行单片机: 运行乐鑫官方的helloworld项目
- 蓝牙部分: 单片机运行乐鑫官方的蓝牙项目,并使用手机连接通信
- TWAI部分: 单片机运行乐鑫官方的TWAI项目,并与小米电机通信
- 改写单片机项目: 根据需求需要将蓝牙项目和TWAI项目组合一起,以实现网页控制esp32单片机向小米电机发送信息
- 完善前端项目: 使用网页控制电机精准旋转
- 组装,最终成品: 组装电路,并于上位机(网页)联调
- 总结
- 未来展望
- github
- 参考文章
未来的进阶目标:
- 优化3d模型
- 动画系统(关键帧),引入贝塞尔曲线,简化机械臂的运动控制,就像css的动画那样(待验证可行性)
- 单片机改为Rust语言开发(应该可行: 参考文章 )
- 尝试使用人工智能
备注:除了前端,其余技术未接触过,所以分的比较细。
所有物料的清单:
| 名称 | 数量 | 价格 |
|---|---|---|
| 小米电机 | 3 | 1497元 |
| ESP32 N16R8 | 1 | 54.90元 |
| TJA1050 CAN模块 | 1 | 6元 |
| 艾迈斯线XT30插头带线 | 3 | 12.6元 |
| usb-can转换器 | 1 | 79元 |
| 24V10A电源 | 1 | 46.56元 |
| DC5.5转XT30转接线 | 1 | 10元 |
| 黑色绝缘胶带 | 1 | 3.97元 |
| 杜邦线 | 2板 | 5.26元 |
| 螺丝螺母套装 | 1 | 17.91元 |
| SolidWorks软件安装费 | 1 | 10元 |
| 3D打印模型 | 1 | 100元 |
| 12V电源 | 1 | 11.16元 |
| 12V转5V转换器 | 1 | 4.9元 |
| 硅胶线18AWG(红黑2米) | 2 | 3.4元 |
| 艾迈斯线XT30连接器线公转母 | 2 | 4.2元 |
| 合计 | 1866.86 |
成品:
简单运行电机
物料:
小米电机 * 1
usb-can转换器 * 1
24V10A电源 * 1
艾迈斯线 * 1
DC5.5转XT30转接线 * 1
连线部分:

can-usb参数设置:
打开小米电机的上位机:
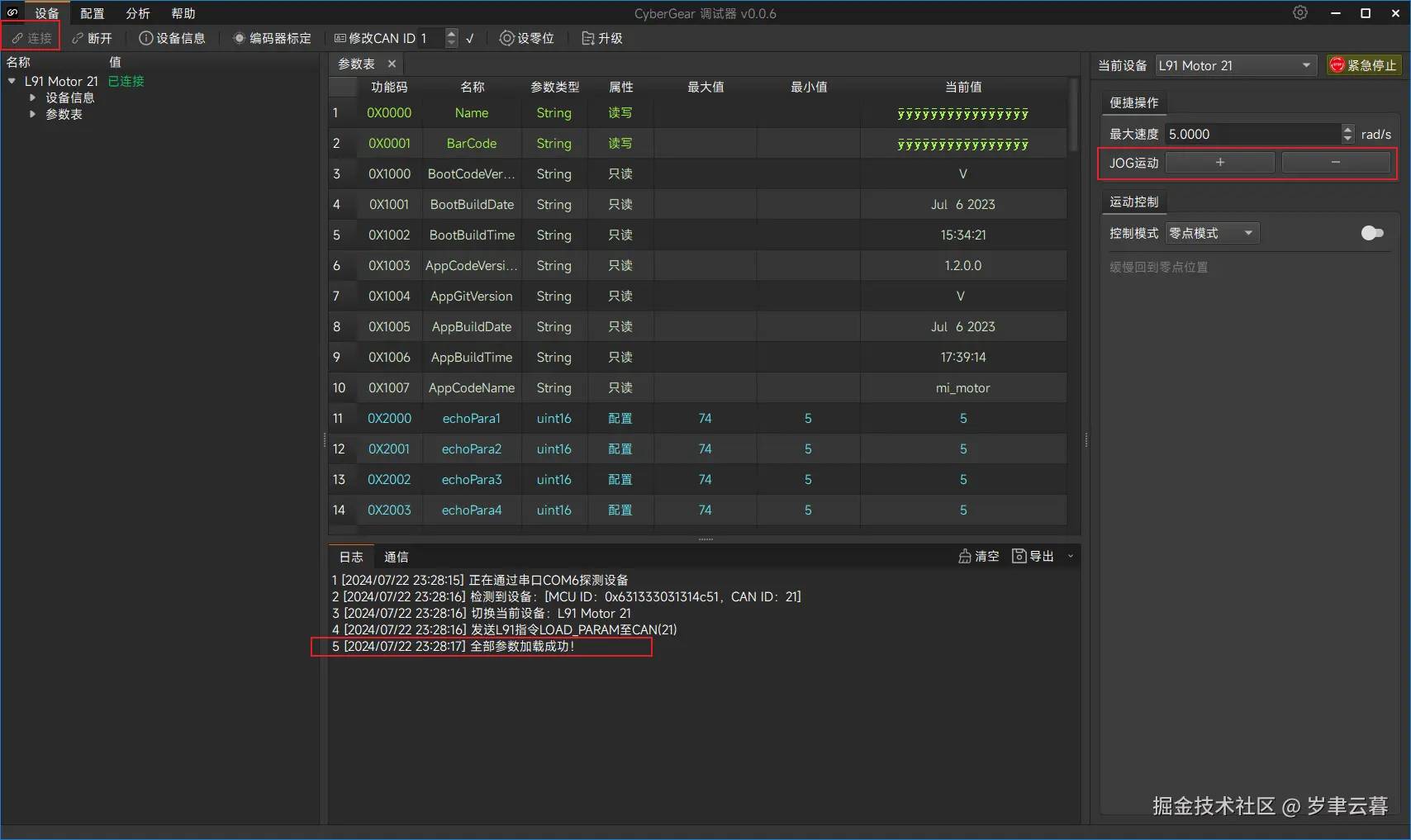
电机成功连接,点击jog运动的加、减号,电机就可以动起来了:

solidworks建模部分
本想做个酷一些的模型,类似稚辉君那种。刚刚简单入门,画起来还是太麻烦了,先画个简单的,以后再优化吧。
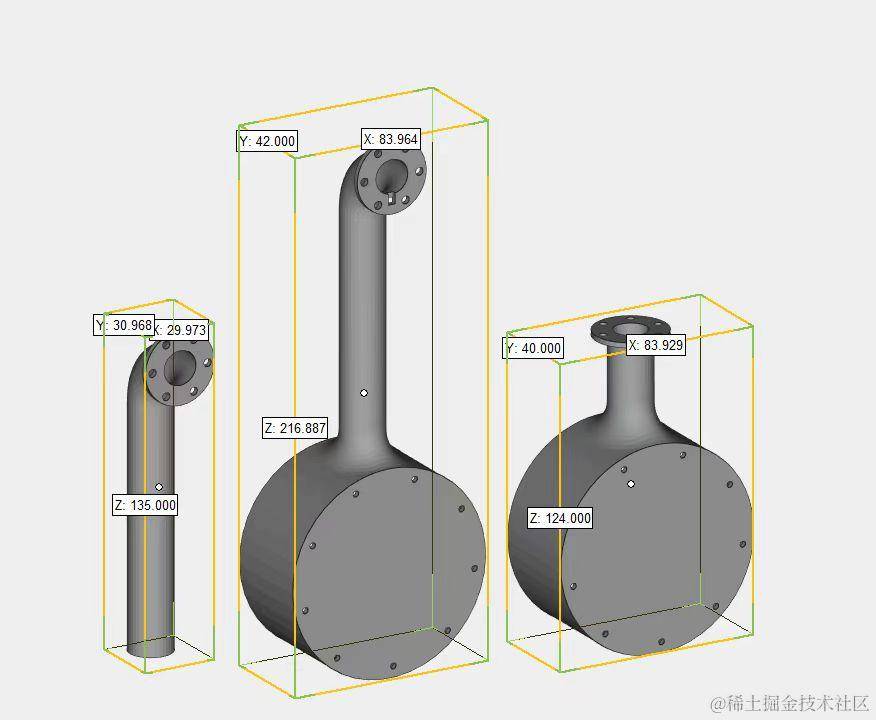
下臂: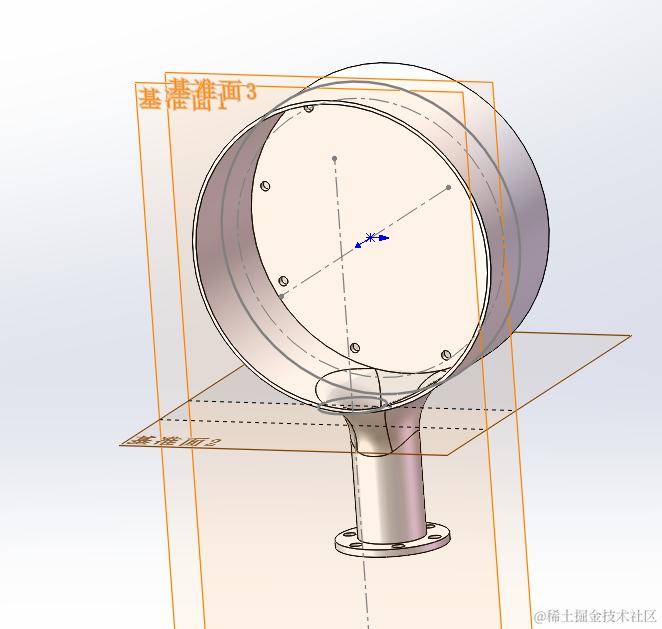
中臂: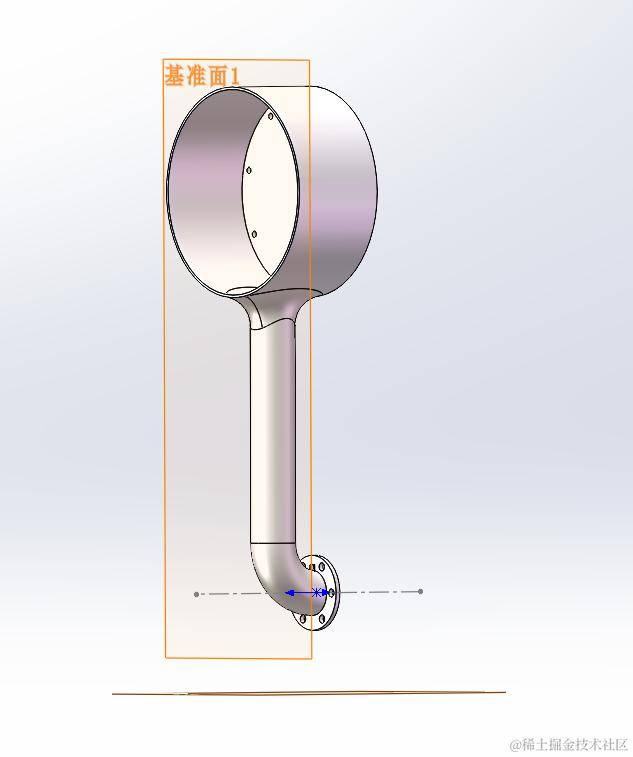
上臂: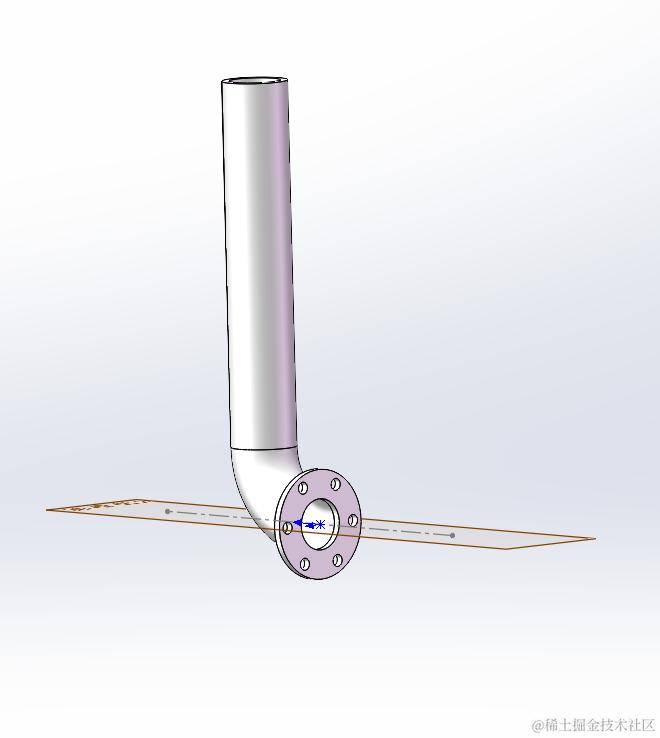
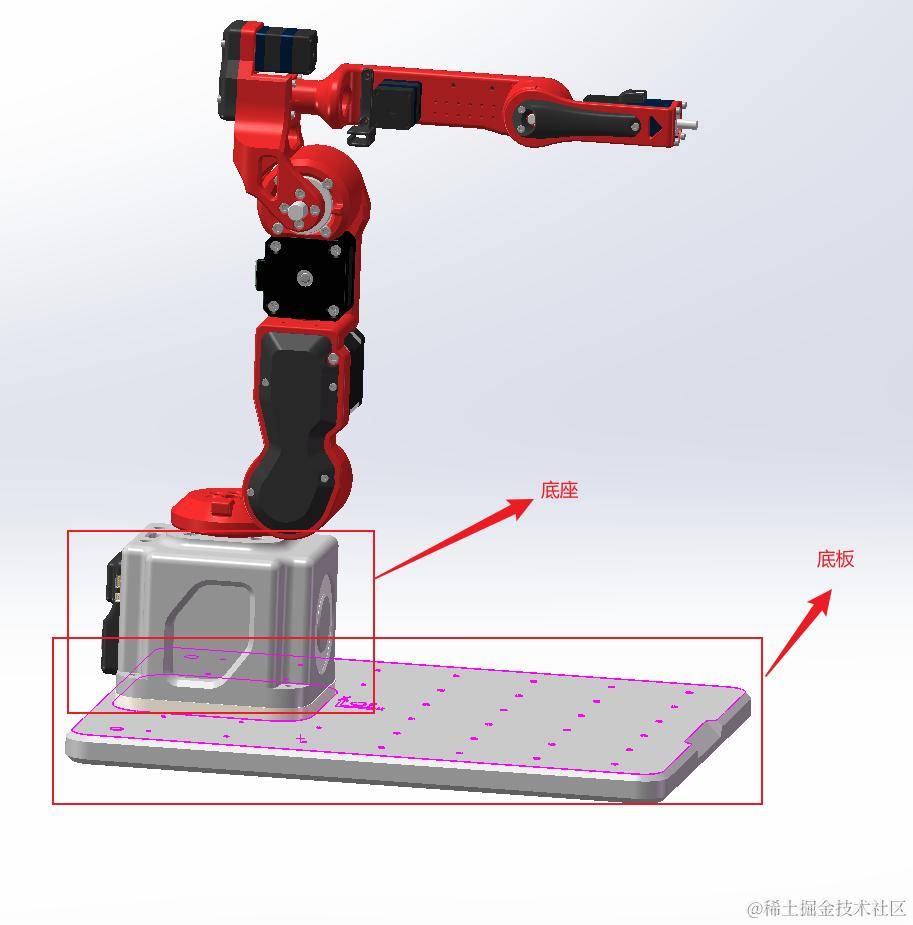
组合起来如下图: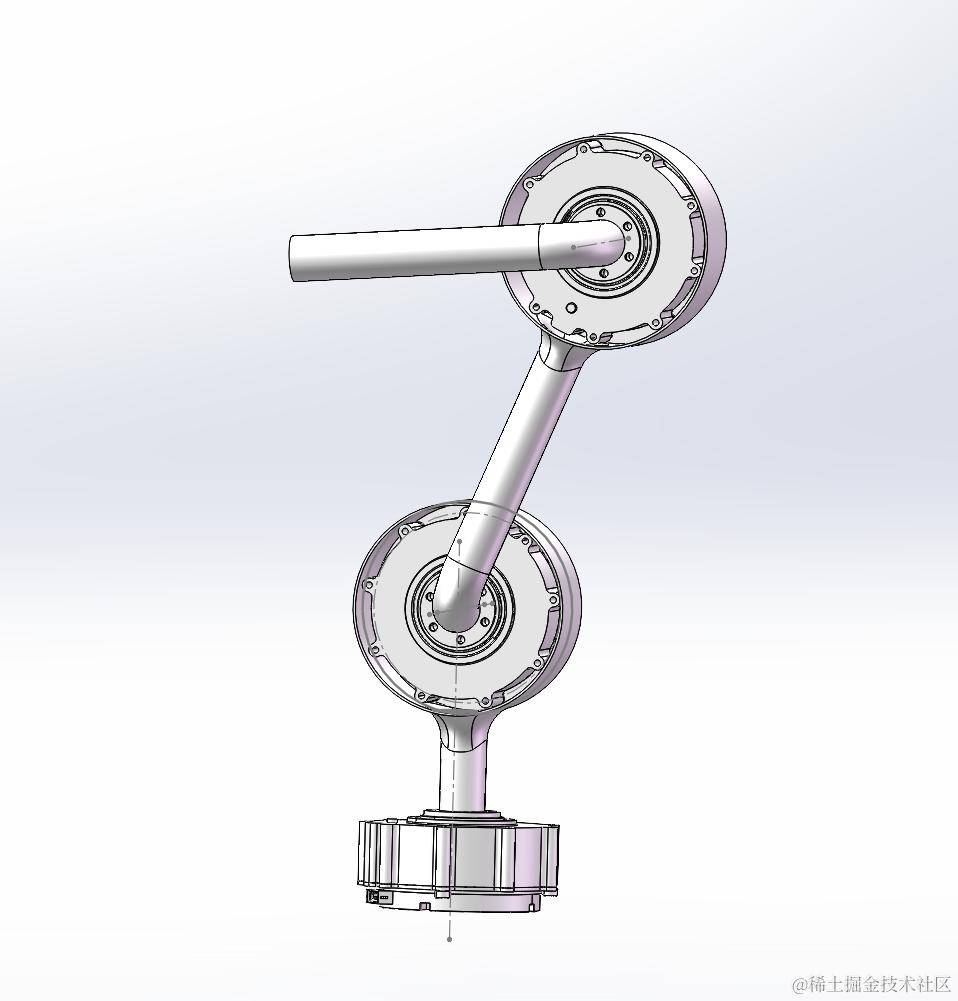
还有个底座,底板没做(暂时这么称呼),大概是用来控制重心的,使机械臂能稳定立在桌面上,以下是稚慧君的机械臂模型,参考看看:
3d打印部分
导出stl文件格式给淘宝的3d打印商家:
模型设计的问题很多,比如螺丝孔太细,管壁太薄变形,蛮多缺陷,先勉强用用。如下图所示:
 简单测试下能不能匹配:
简单测试下能不能匹配:

还行,勉强能用,就是有点丑。这章到此结束。
前端项目部分
目标: 做个网页用来控制机械臂
技术: vue3 + threejs
步骤:
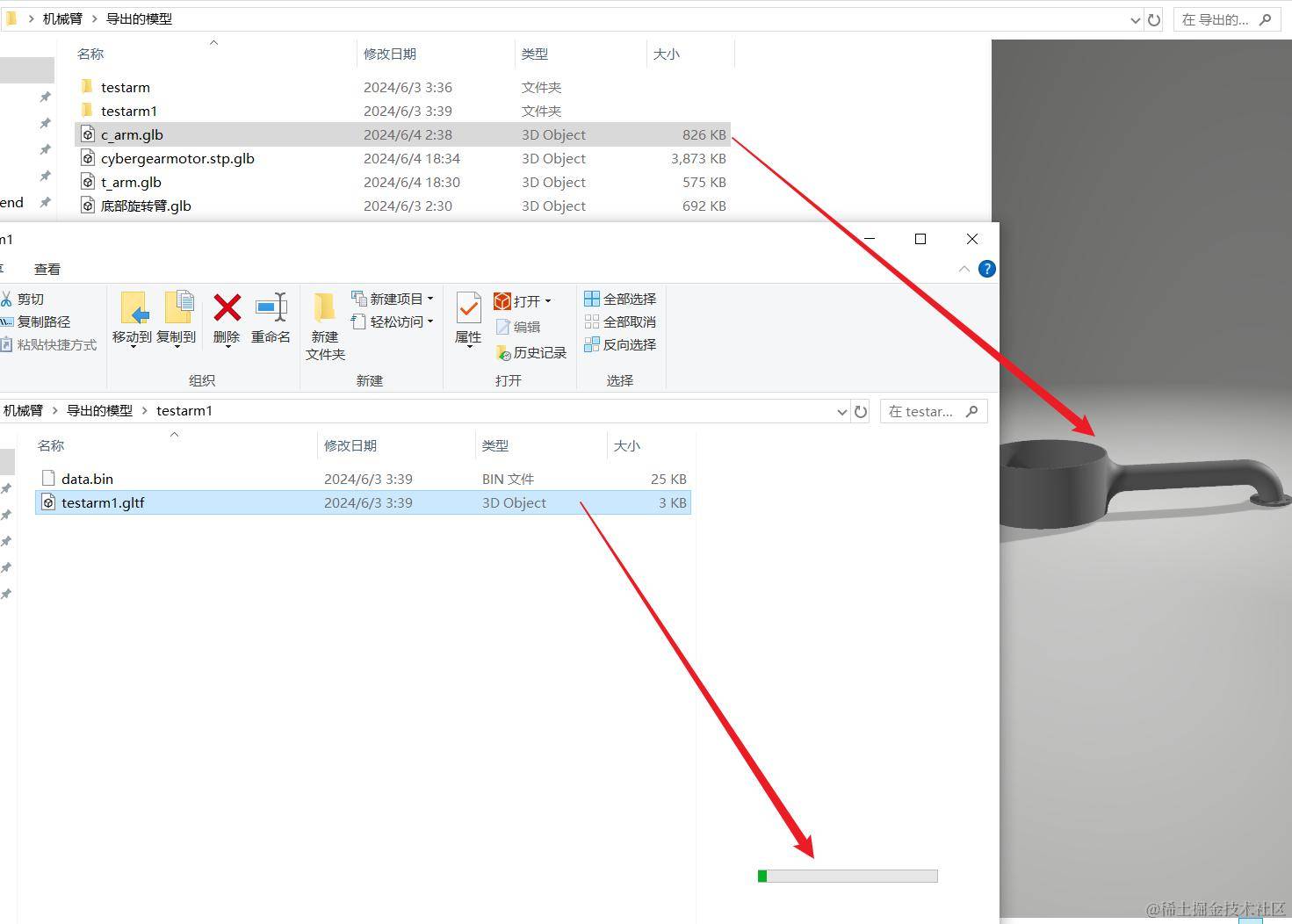
1.solidworks导出3d模型:在此使用glb格式(不使用.gltf格式的原因是:gltf格式会生成.bin文件,在本地预览失败,在项目中调用失败,可能是用的方式不对)。
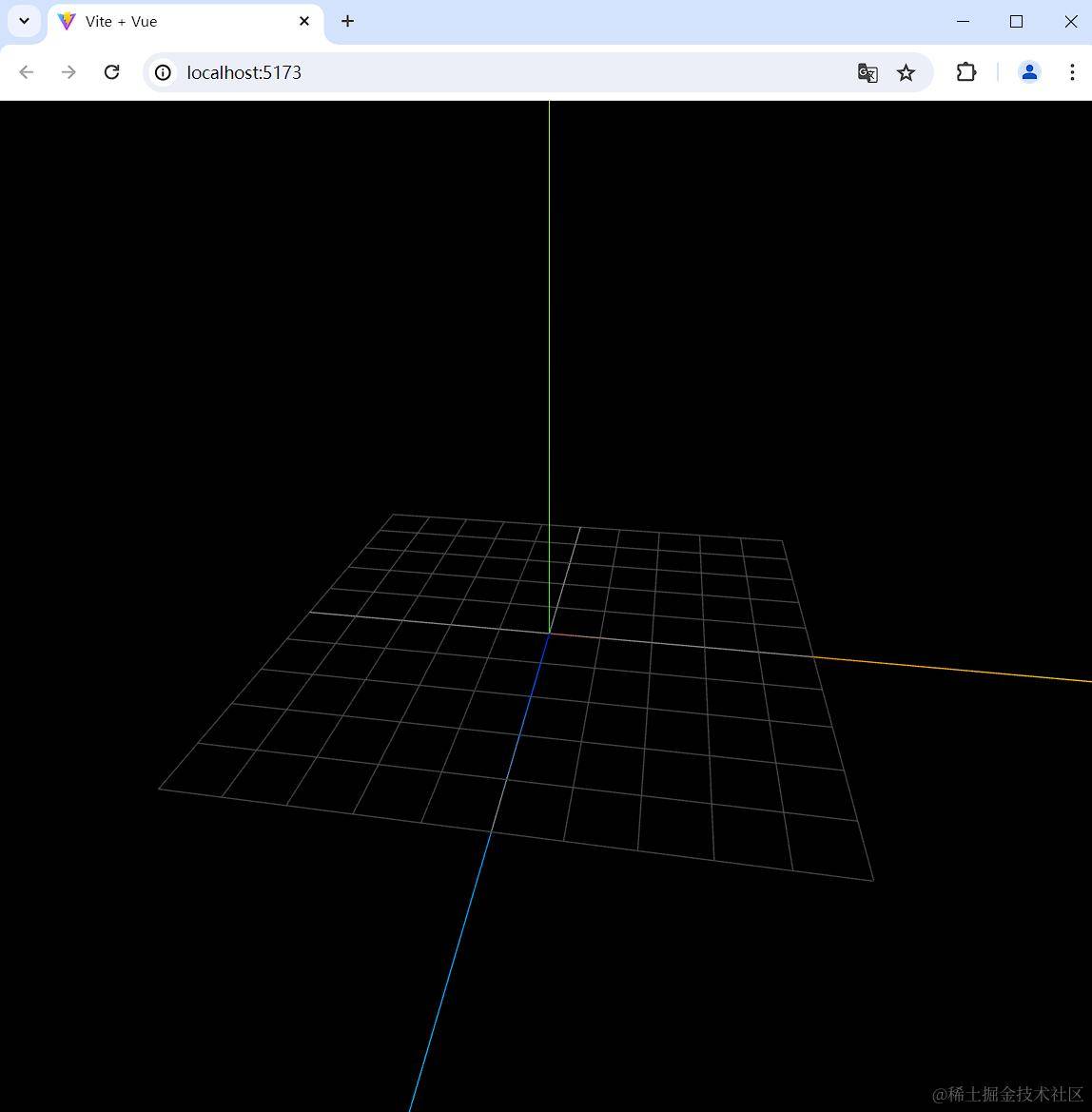
- 搭建前端工程并搭建threejs场景(参考文章):
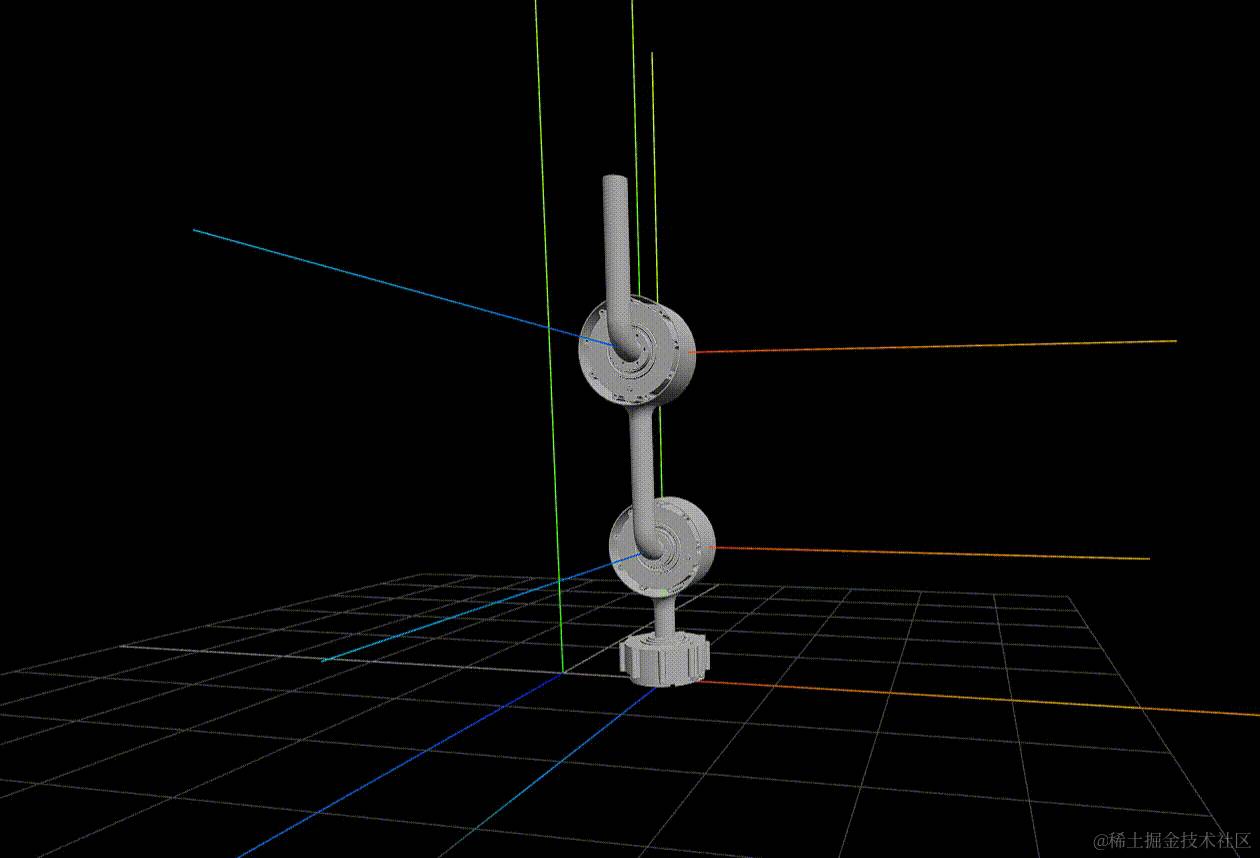
 4. 调整模型并添加控制轴:因为机械臂的每个关节只能固定一个方向旋转(参考文章: ),所以用transformControls来控制,并将其他其他轴隐藏。如下图所示:
4. 调整模型并添加控制轴:因为机械臂的每个关节只能固定一个方向旋转(参考文章: ),所以用transformControls来控制,并将其他其他轴隐藏。如下图所示:
 5. 模型调整:重新使用solidworks装配并导出(因为臂需要和电机是一个整体),并且调整模型的原点,以便更容易控制。
5. 模型调整:重新使用solidworks装配并导出(因为臂需要和电机是一个整体),并且调整模型的原点,以便更容易控制。
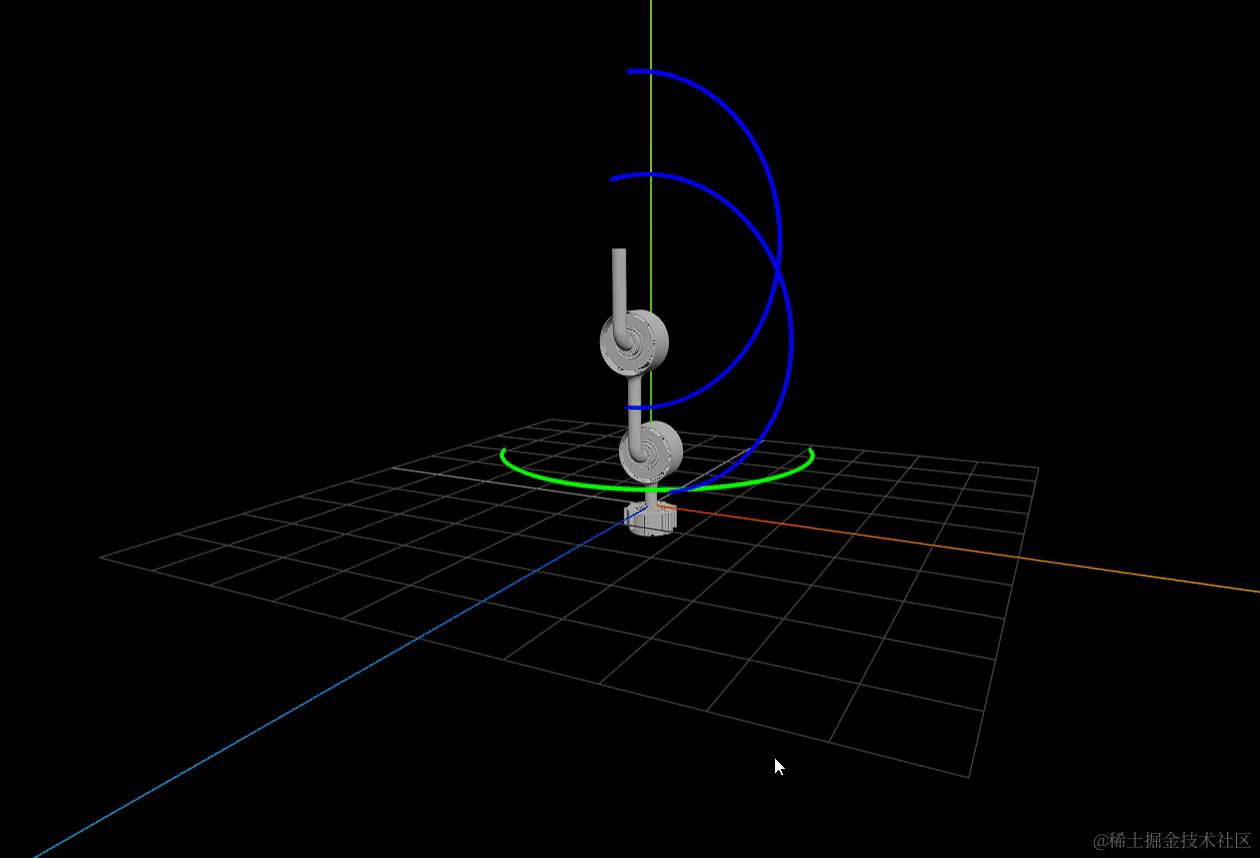
- 控制优化:想要的效果是骨骼系统那样,比如: three.js示例,但solidworks中似乎没有骨骼系统,所以就先用THREE.Object3D做个简单控制(参考文章 ),transformControls好像无法控制Object3D,所以舍弃,效果如下图所示。
这章先简单到此为止,接下来做单片机部分。
尝试运行单片机
目标: 运行esp32官方的hello world项目
物料选择:
- esp32-s3 N8R16单片机,主要原因是支持蓝牙,wifi和can通信。
- 一个typeC线
如下图:

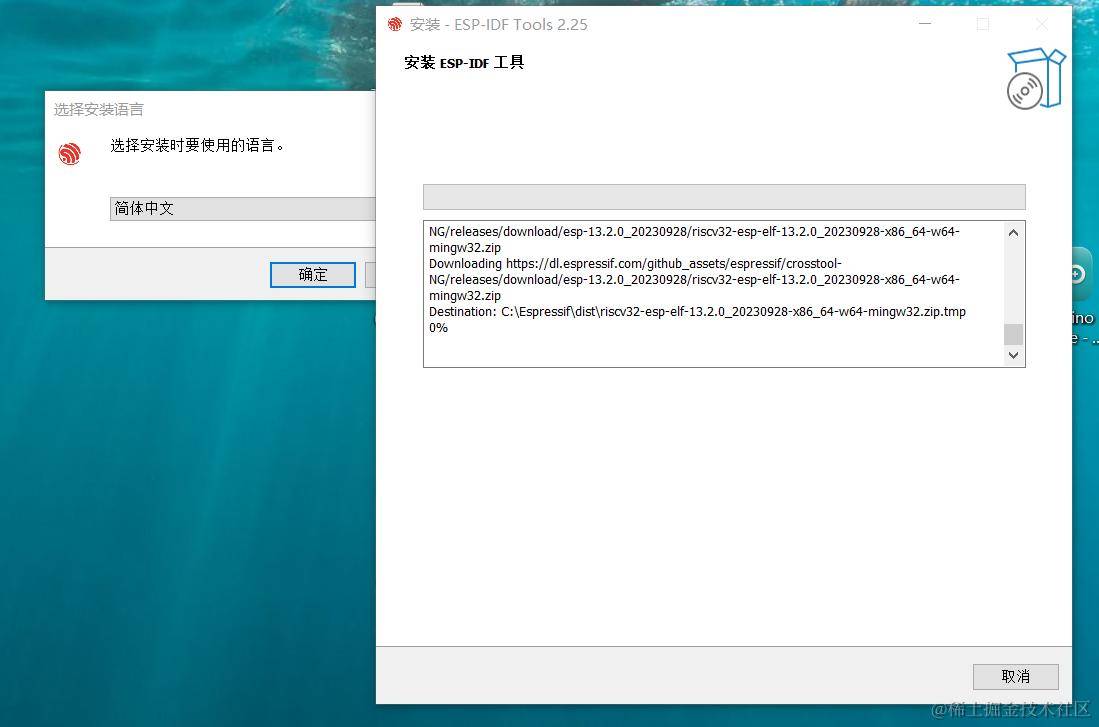
esp-idf环境搭建
- 根据官方文档: esp快速入门我选择的是在线安装,按默认配置安装,
 2. 成功之后桌面会有快捷键图标:
2. 成功之后桌面会有快捷键图标:
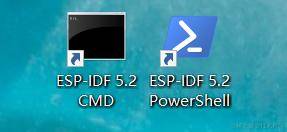
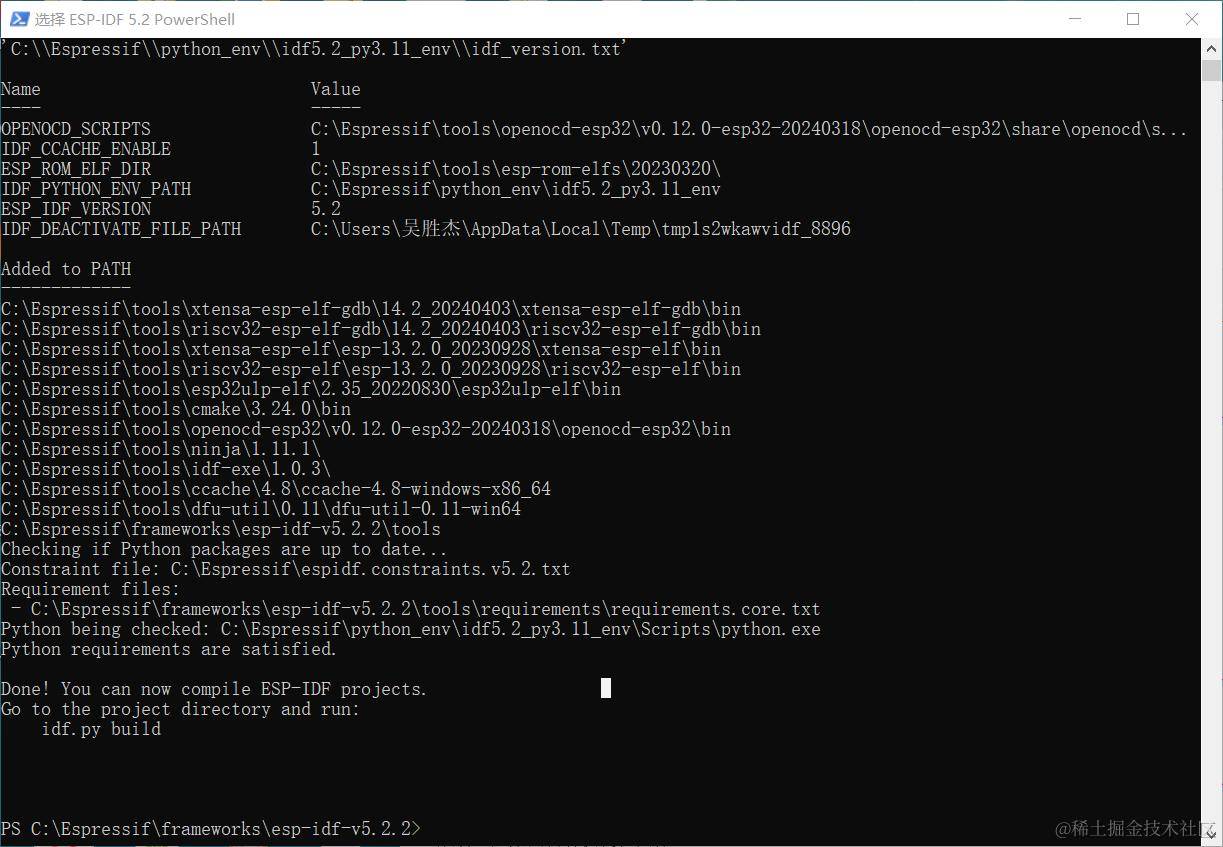
3. 双击运行会自动初始化环境,如下图,接下来编译,烧录都会用到,记得使用管理员身份运行:
尝试helloworld
- 从esp-idf项目中复制出helloworld项目,粘贴至你的项目文件夹下(猜测:以后的项目应该也是去改官方的项目示例):
 2. 接下来就是按照官方文档步骤来走:
2. 接下来就是按照官方文档步骤来走:
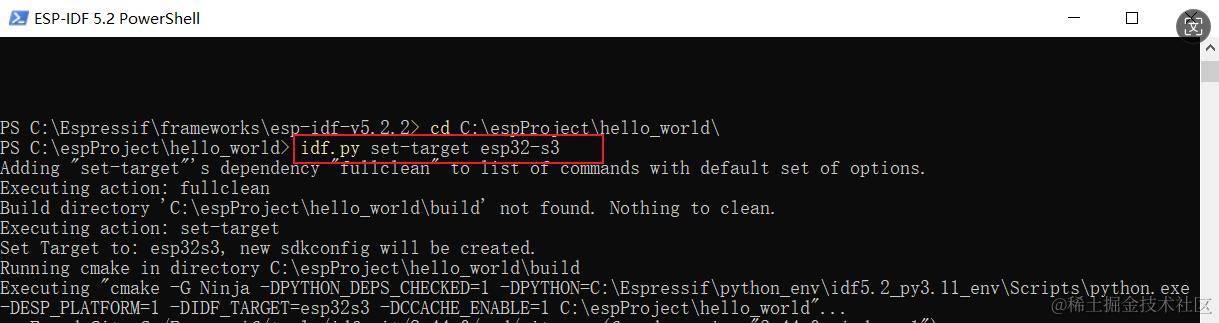
① 设置编译的目标平台: 成功则会生成build文件夹:
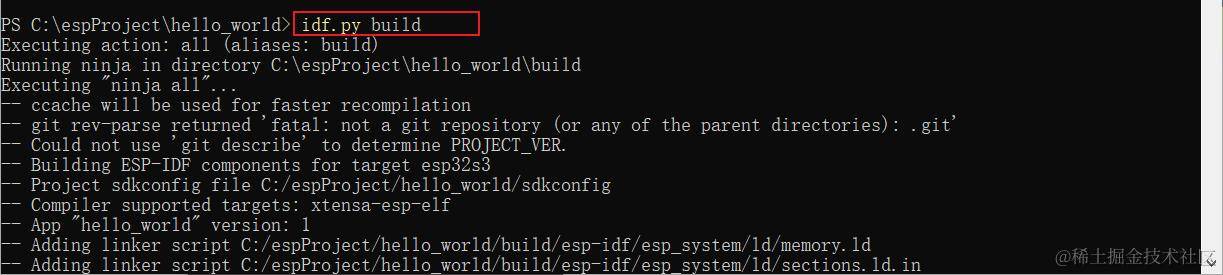
 ② 编译代码: 编译成功之后在build文件夹下会生成.bin文件。
② 编译代码: 编译成功之后在build文件夹下会生成.bin文件。
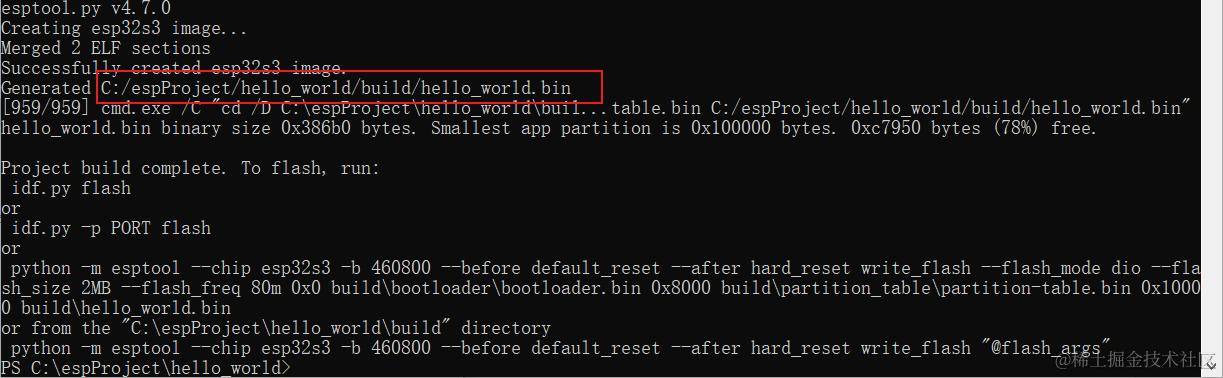 ③ 烧录: 将程序写入单片中,端口可不写,会自动寻找(注意: typeC插入esp32的正确的口,我用的是COM口):
③ 烧录: 将程序写入单片中,端口可不写,会自动寻找(注意: typeC插入esp32的正确的口,我用的是COM口):
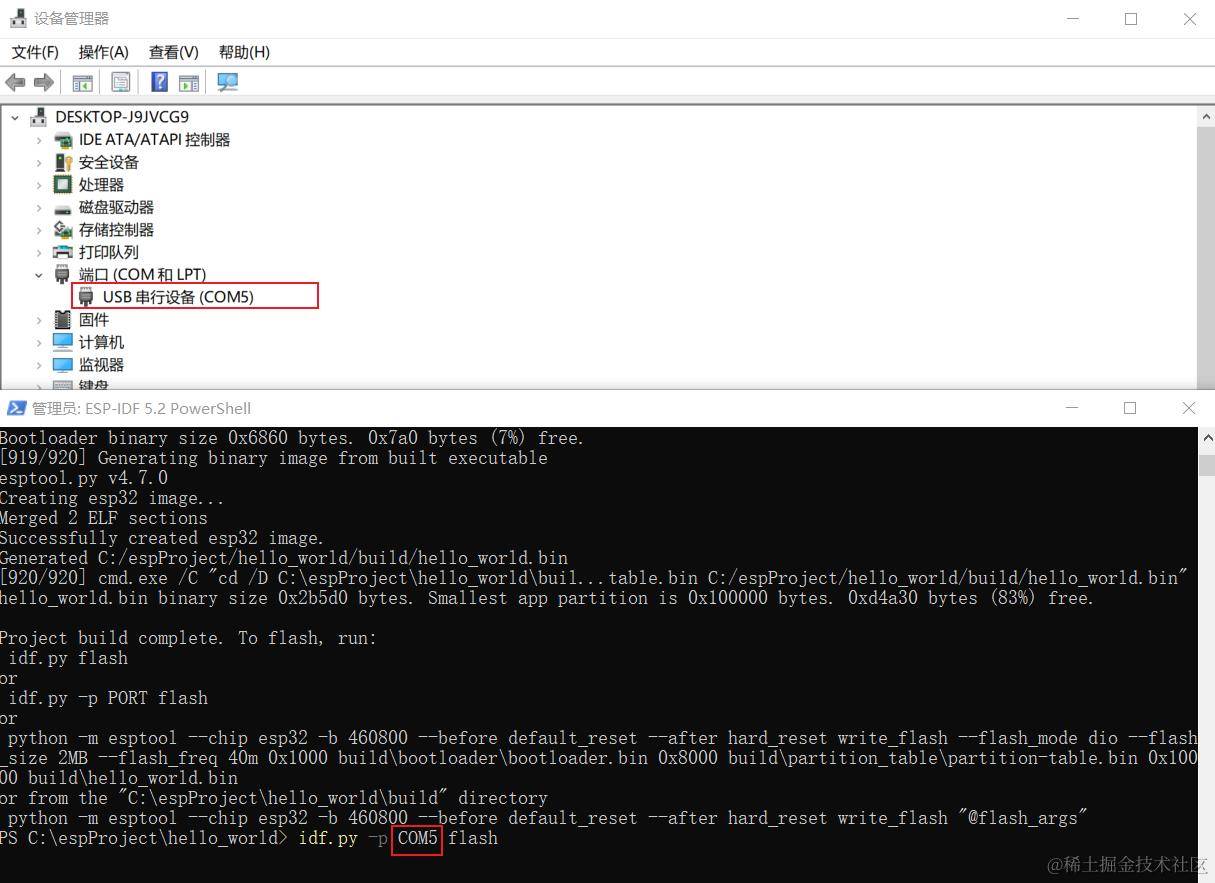
④ 执行命令idf.py monitor可看到程序的输出:
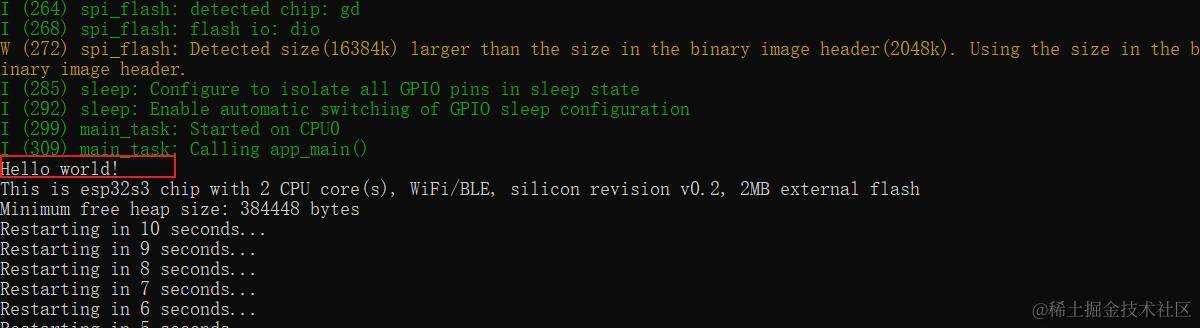
3.到此算简单入门了,接下来就是探索蓝牙和TWAI协议了。
蓝牙部分
目标: 运行官网的蓝牙Master项目,并尝试用LightBlue(功能类比postman,用来调试蓝牙)连接蓝牙并传输数据
物料:
esp32-s3单片机 * 1
usb-typec线 * 1
蓝牙的概念:
参考文章
运行官方项目:
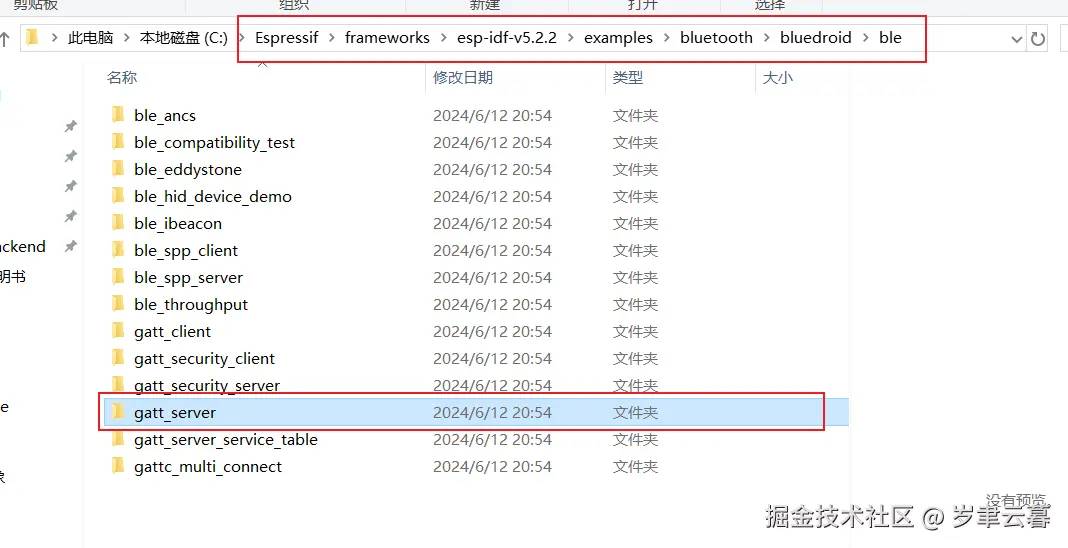
- 从esp-idf项目中复制出gatt-server项目,粘贴至你的项目文件夹下
- 烧录进单片机并运行
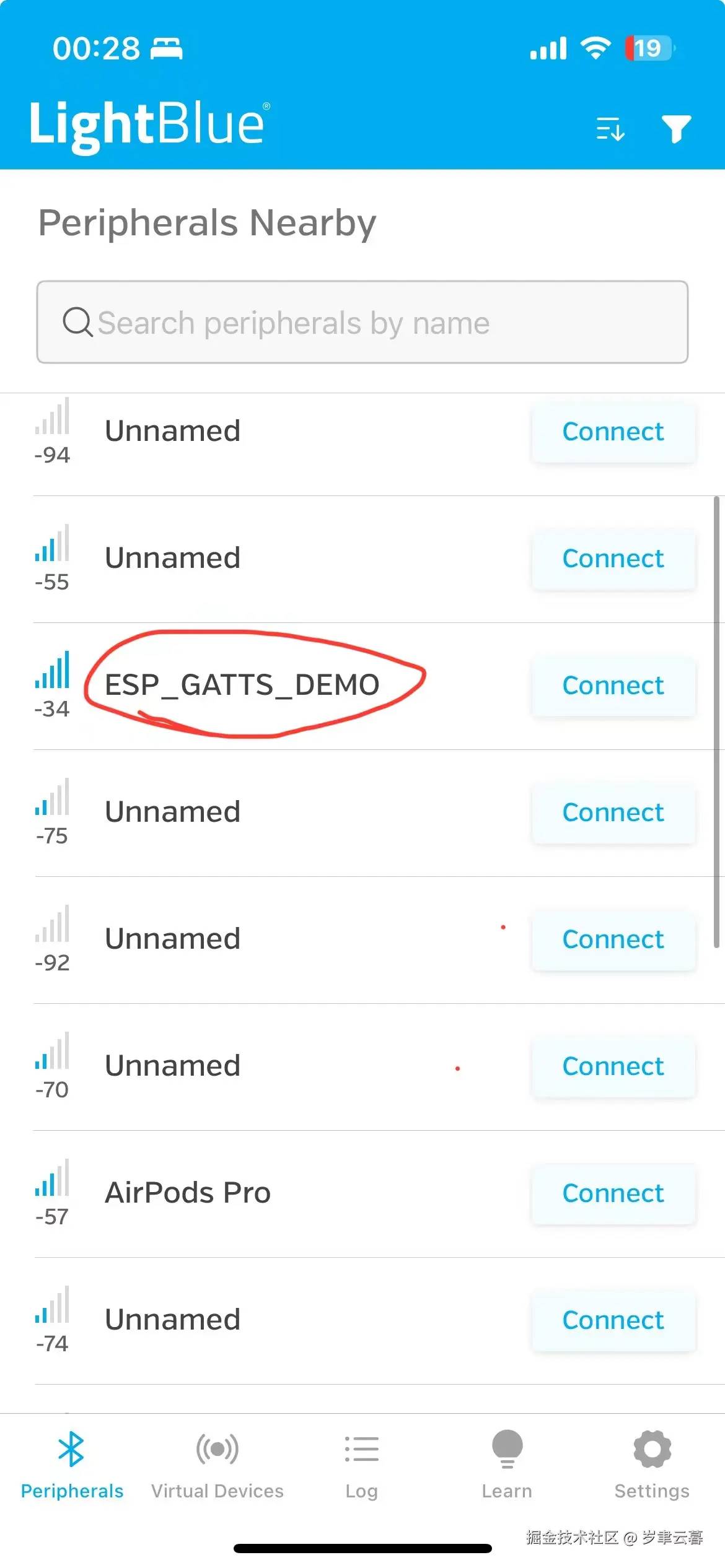
- 手机下载lightblue软件
 4. 打开lightblue并搜索单片机的蓝牙信号:
4. 打开lightblue并搜索单片机的蓝牙信号:
 5. 连接成功之后,尝试调用蓝牙的write方法给单片机传递消息:
5. 连接成功之后,尝试调用蓝牙的write方法给单片机传递消息:
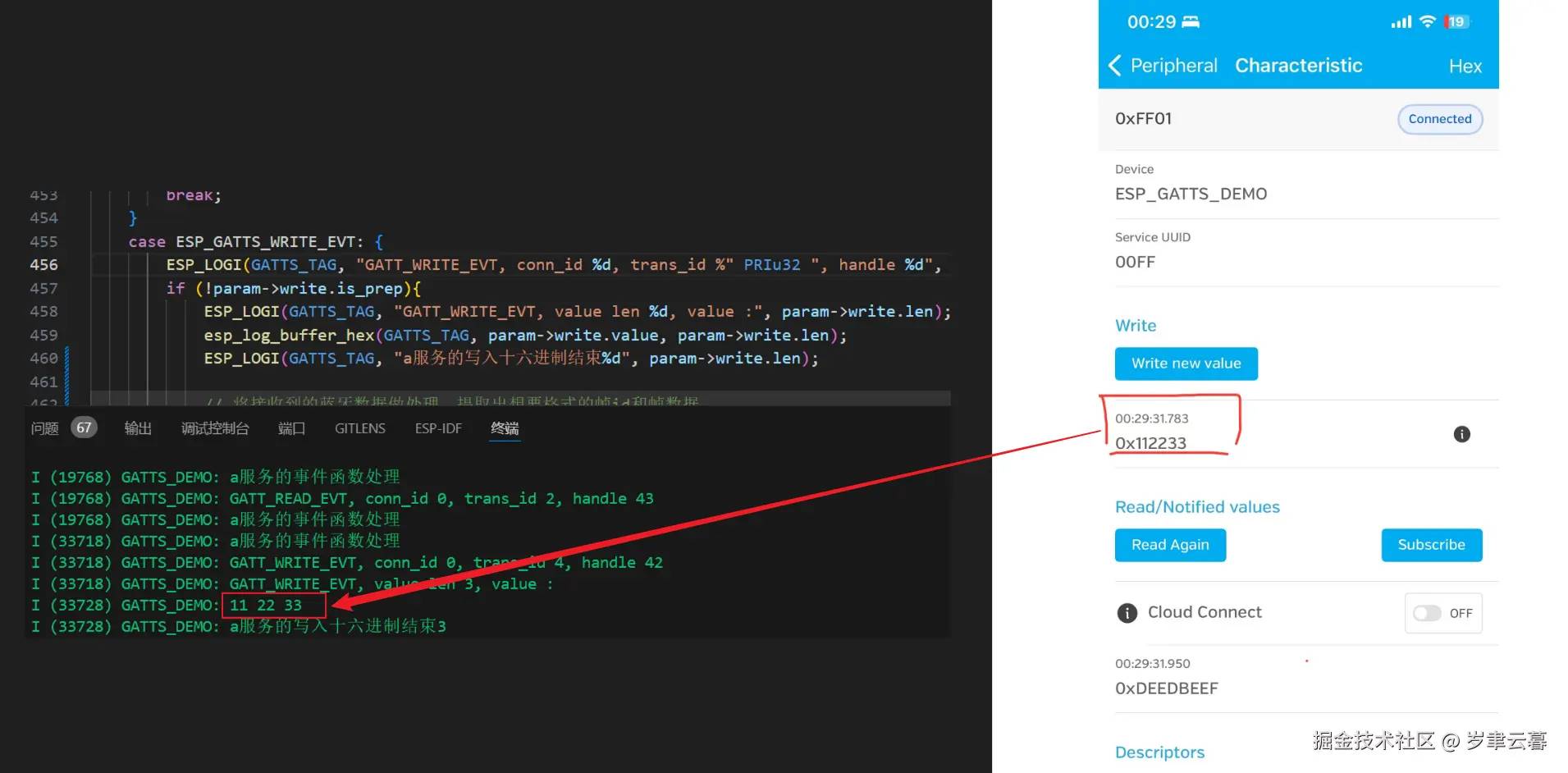 6. 单片机成功接收到来自的lightblue传输的消息,这章简单到此结束。
6. 单片机成功接收到来自的lightblue传输的消息,这章简单到此结束。
TWAI部分
目标: 运行官方的TWAI-network项目,并尝试使用can调试工具互通数据,然后尝试发送指令给小米点机
物料:
esp32-s3单片机 * 1
usb-typec线 * 1
TJA1050 can模块 * 1
杜邦线 * 6根
usb-can转换器 * 1
小米电机 * 1
Q&A:
问 为什么要用这个TWAI?
答:因为小米电机是can协议通信,而esp32-s3支持TWAI协议,TWAI兼容can2.0协议(TWAI官方文档)。
问:需要其他什么硬件支持吗?
答:esp32-s3单片机只有TWAI模块,但没有can消息的收发器,所以单片机上要额外接入TJA1050 can收发器。
CAN协议
CAN协议的参考文章,简单看下协议结构,如下图所示(小米电机采用扩展数据帧):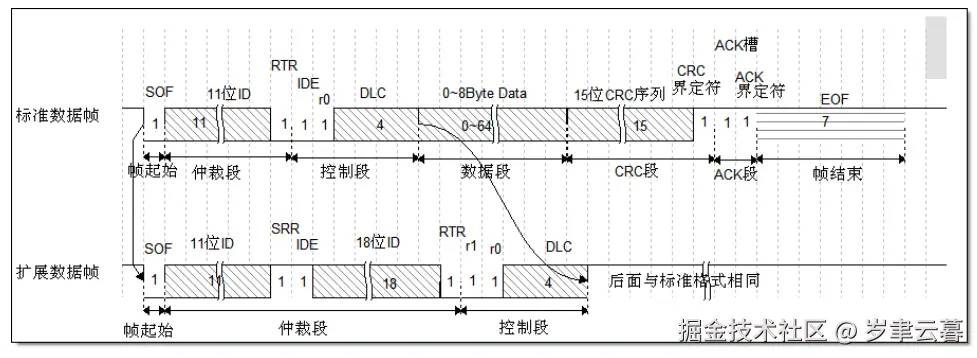
硬件连线
这个正确的硬件连线搞了好几天,查阅了很多资料,没人指导的情况下有点懵。正确的连线情况是:运行官方项目,电脑的can调试器能收到相关消息。
单片机与TJA1050连线如下图:

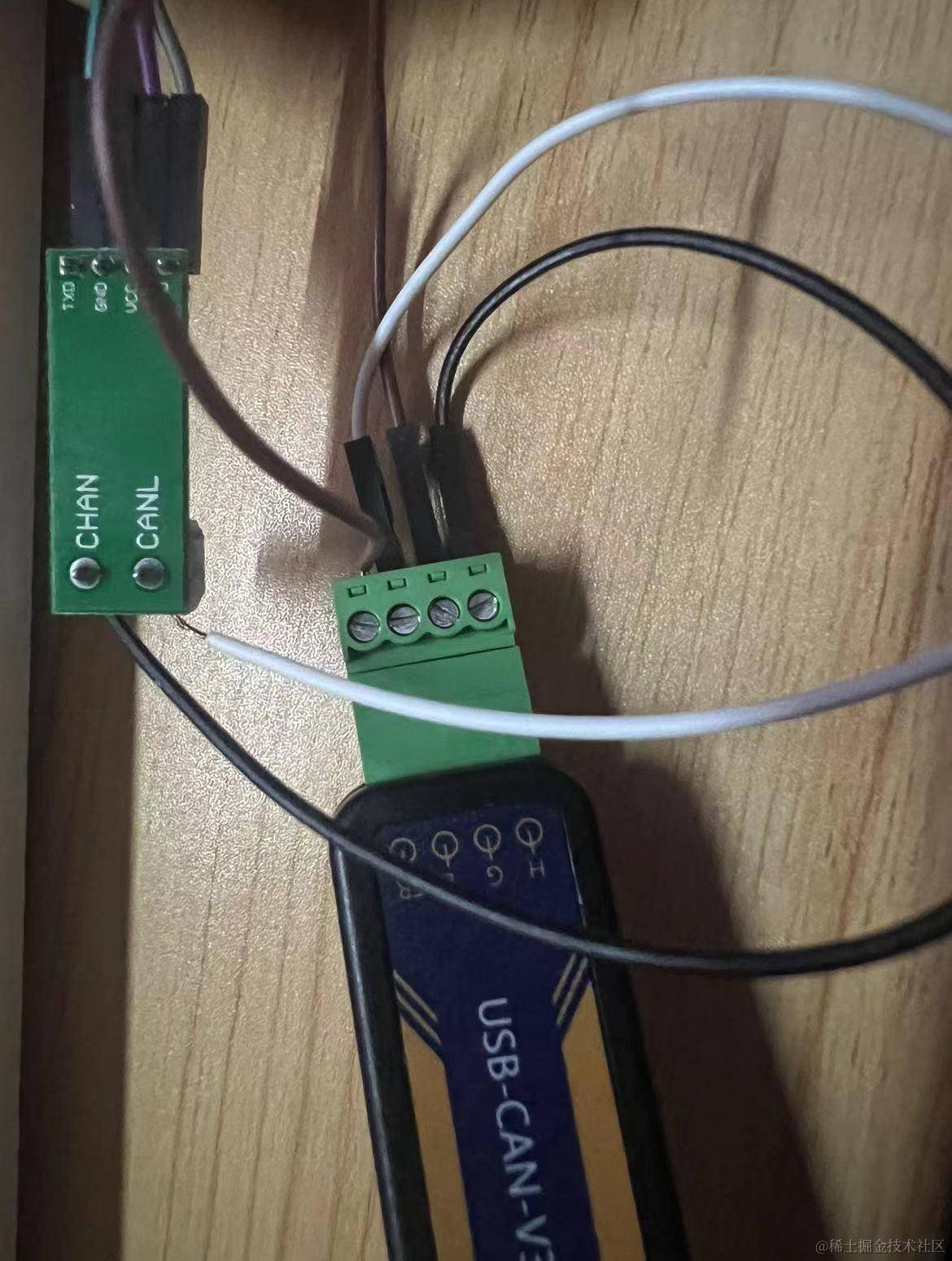
TJA1050与usb转can转换器连线如下图,usb-can转换器需要短接内置的120欧姆电阻:
检查单片机与TJA1050收发器是否正常连接
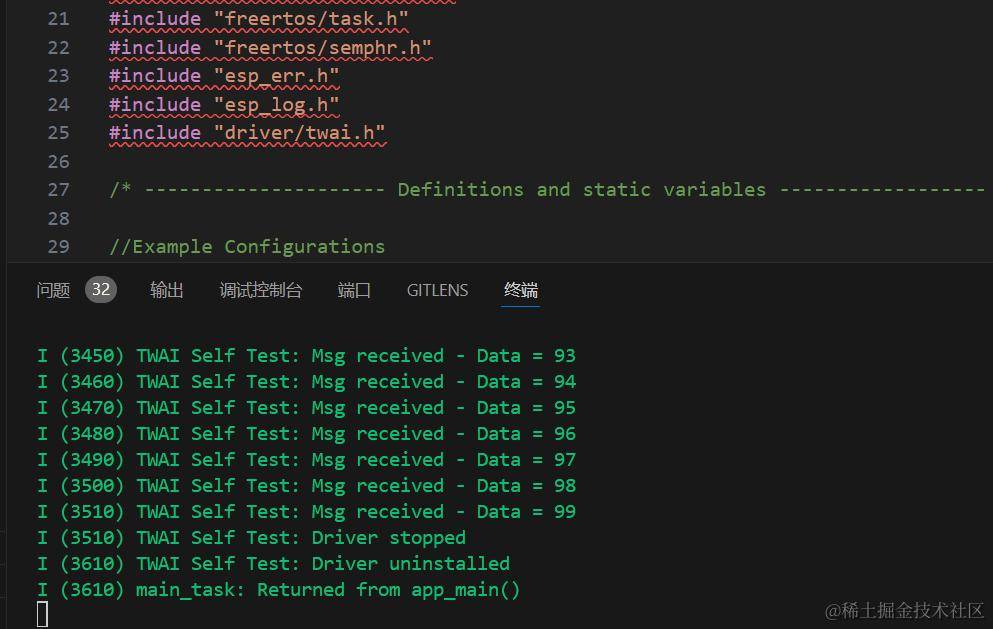
- 运行官方示例项目: twai_self_test
- 正常运行的console:
测试收发消息
- 正确连接TJA1050与usb-can转换器的线
- 运行官方示例项目: twai_network_master
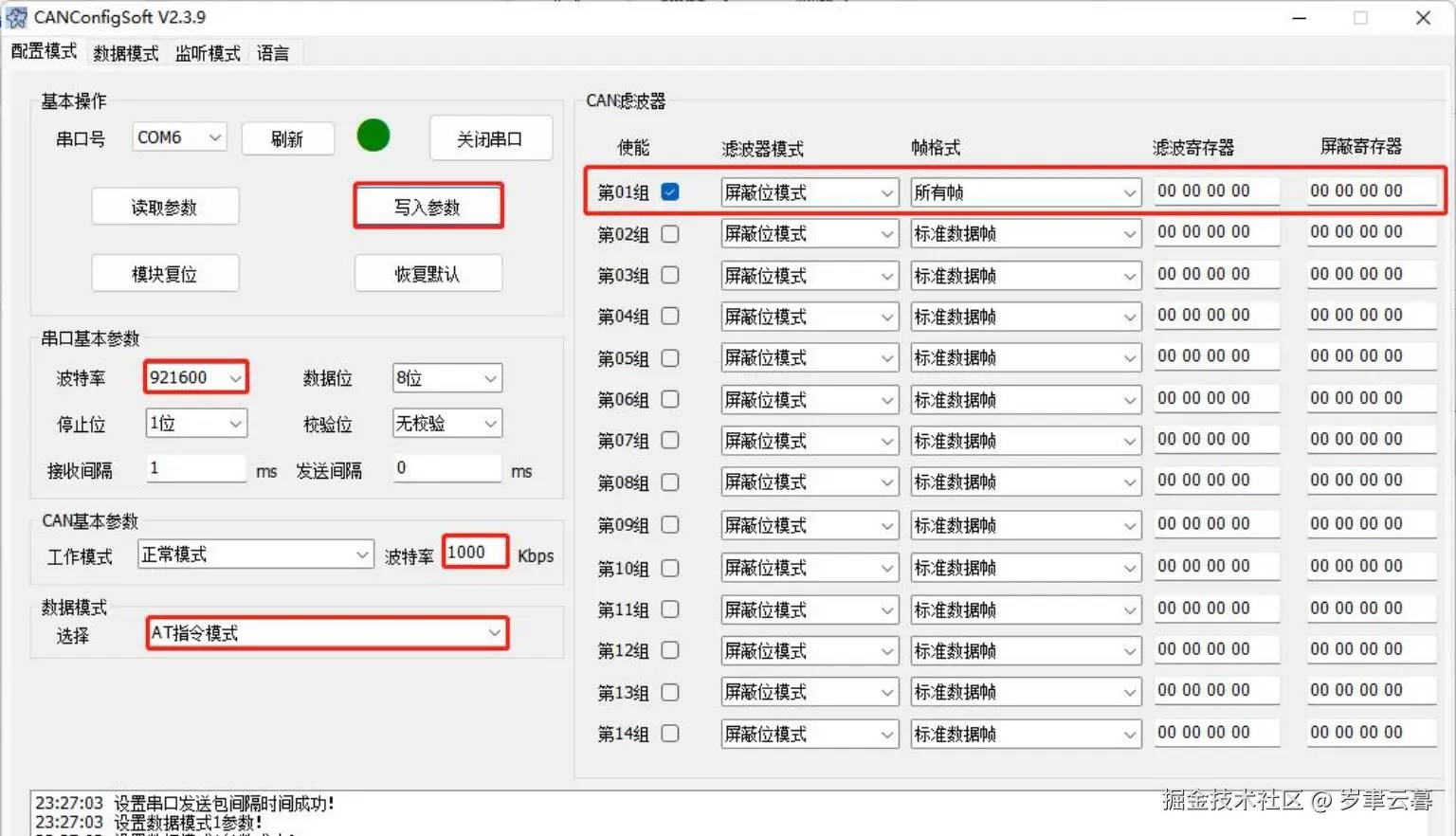
 3. 修改参数: usb-can转换器的波特率要与单片机的一致(在此我设置为1Mbits), 还有就是设置为包模式。can调试工具是usb-can转换器商家开发的,不同商家软件界面可能不同,但功能参数应该是相似的。如下图:
3. 修改参数: usb-can转换器的波特率要与单片机的一致(在此我设置为1Mbits), 还有就是设置为包模式。can调试工具是usb-can转换器商家开发的,不同商家软件界面可能不同,但功能参数应该是相似的。如下图:
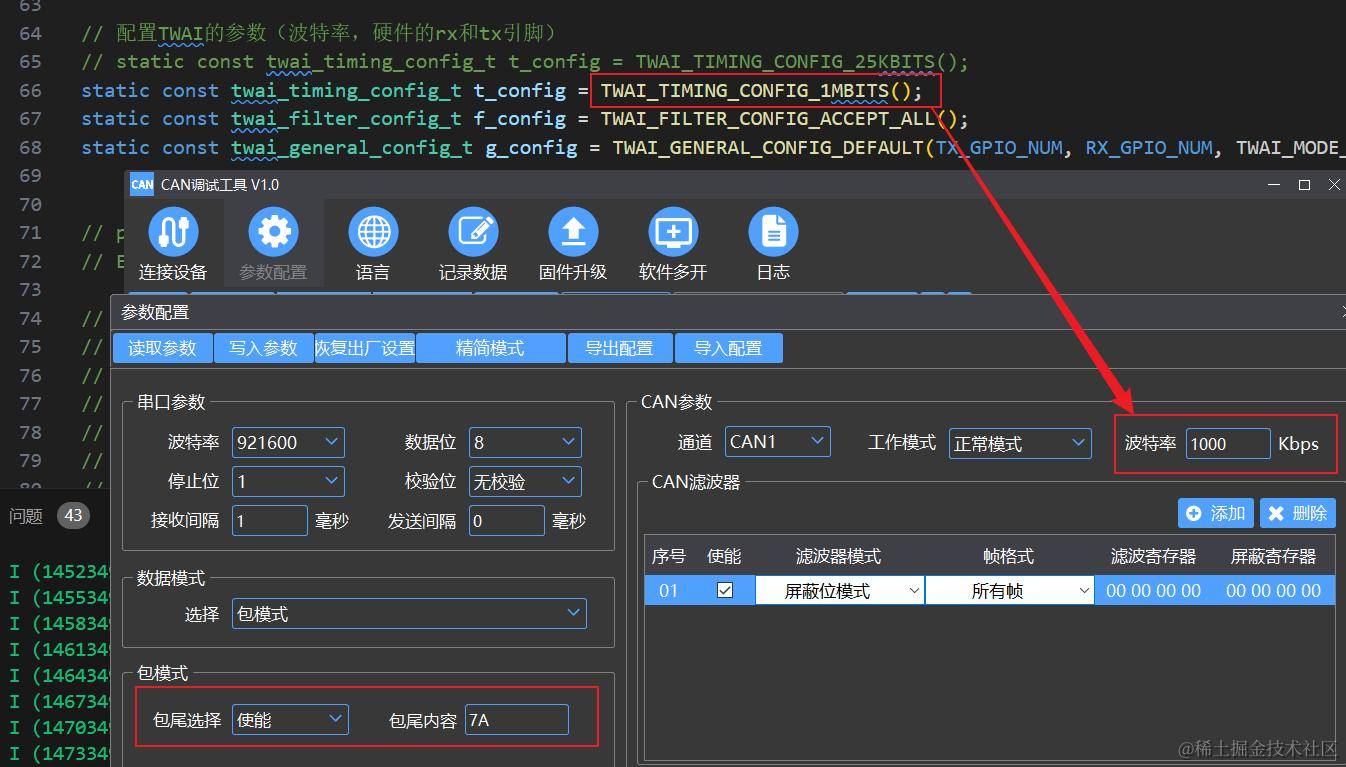 4. 修改代码: 因为twai_network_master项目需要与twai_network_slave项目配合,意味着需要两块单片机(但我只有一块,想法是esp32跟usb-can转换器通信,后来证实可行)。展示了ping信号,收发消息和命令任务控制等功能。而我只需要最简单的收发消息,故简化代码逻辑,并与usb-can转换器通信。如下图:
4. 修改代码: 因为twai_network_master项目需要与twai_network_slave项目配合,意味着需要两块单片机(但我只有一块,想法是esp32跟usb-can转换器通信,后来证实可行)。展示了ping信号,收发消息和命令任务控制等功能。而我只需要最简单的收发消息,故简化代码逻辑,并与usb-can转换器通信。如下图:
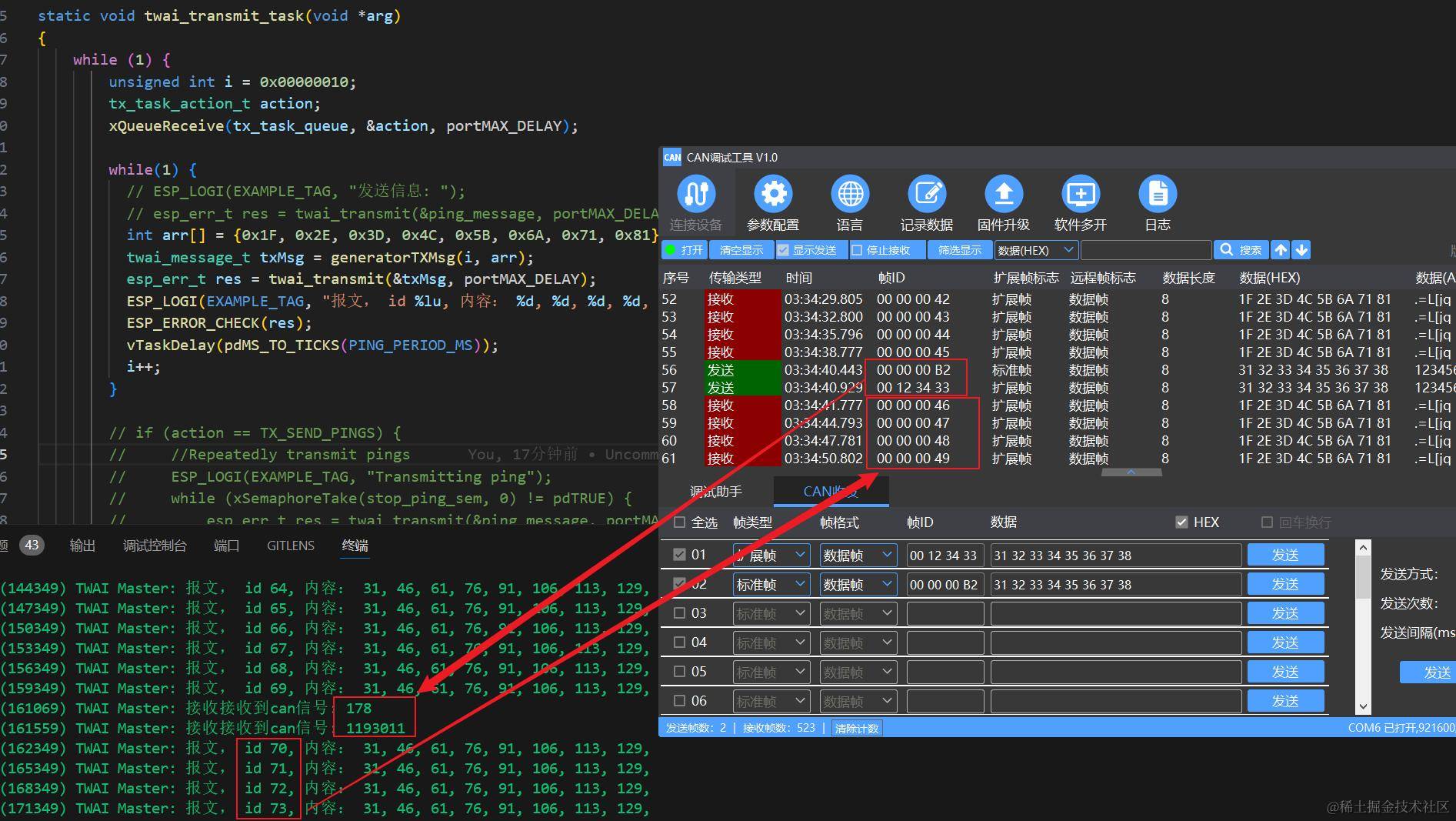
到此算是一个重要标志节点:可以使用TWAI收发消息。
发送指令控制小米电机
- 观察下小米上位机通信时的指令,来分析其中含义:
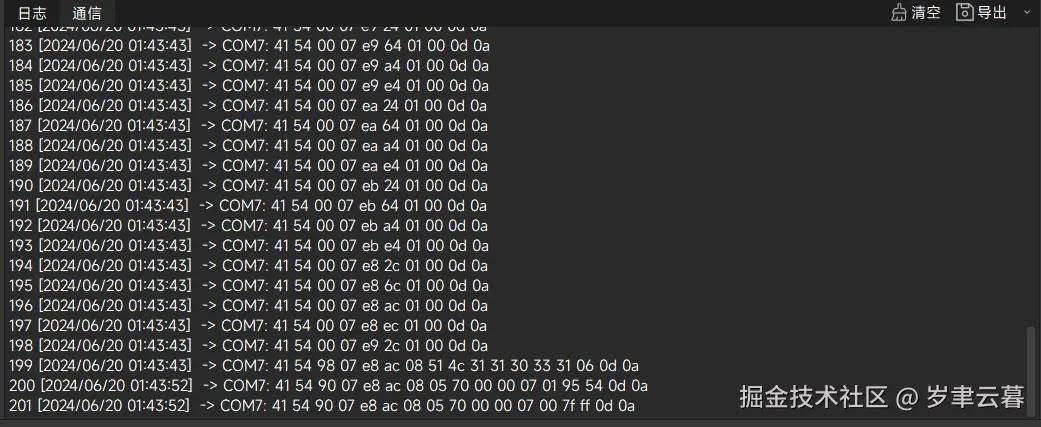 2. 好吧,根据can协议看了很久没分析出什么(好像不同的can master有不同的格式),又看了遍官方文档,有单独的文件进行说明:
2. 好吧,根据can协议看了很久没分析出什么(好像不同的can master有不同的格式),又看了遍官方文档,有单独的文件进行说明:
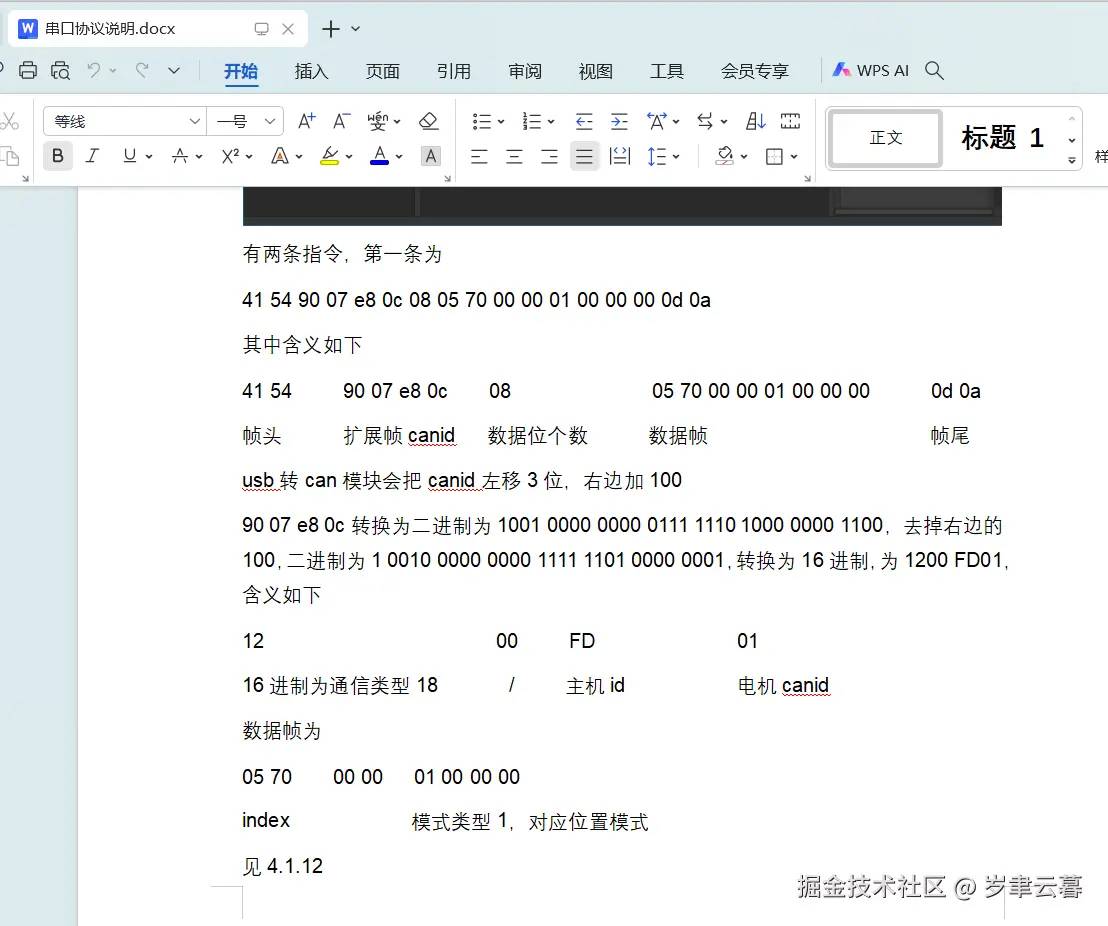 3. 数据帧蛮复杂,看的很迷糊,参考解析的文章,由此可以得到简单的四条测试指令:
3. 数据帧蛮复杂,看的很迷糊,参考解析的文章,由此可以得到简单的四条测试指令:
① 使能指令:AA 01 00 08 03 00 FD 15 00 00 00 00 00 00 00 00 7A
简单解析下:
帧头: AA 是否扩展帧: 01中的1 data_length_code: 08中的8 帧id: 03 00 FD 15 即通信类型3 发送者的的canid为0xFD 接收者的canid为0x15 数据: 00 00 00 00 00 00 00 00 帧尾: 7A ② jog +5rad/s指令:AA 01 00 08 12 00 FD 15 05 70 00 00 07 01 6A AA 7A
③ jog停止指令: AA 01 00 08 12 00 FD 15 05 70 00 00 07 00 7F FF 7A
④ 停止指令: AA 01 00 08 04 00 FD 15 00 00 00 00 00 00 00 00 7A
- 连线小米电机(电机的波特率也是1Mbits),运行项目,效果如下图:
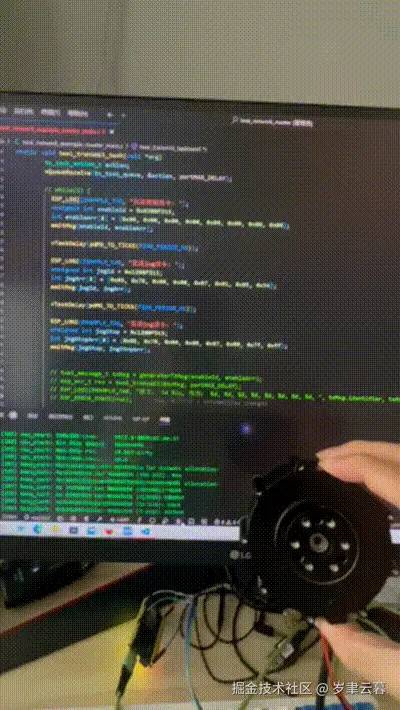
这章简单到此结束。
改写单片机项目
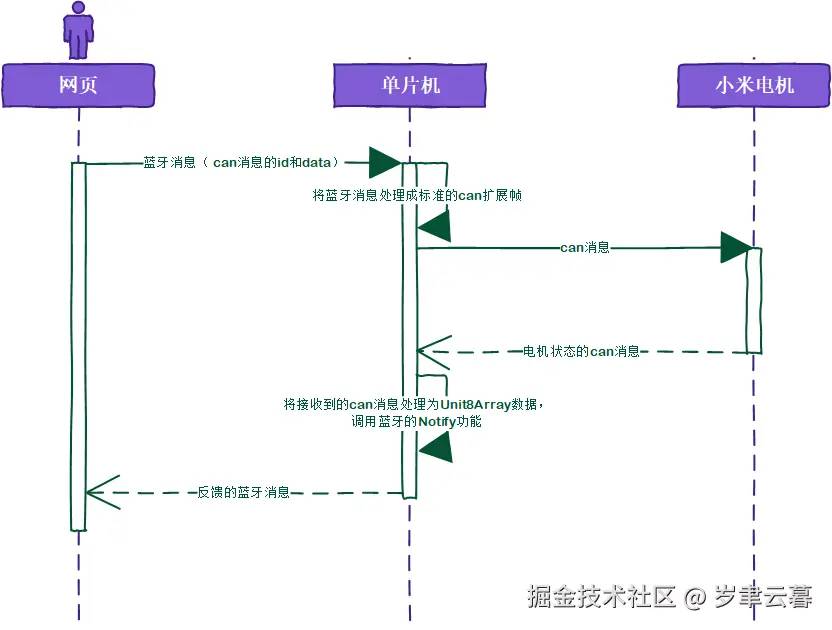
目标: 将蓝牙和TWAI项目集合在一起,单片机的最终功能是:① 接收蓝牙信息,将其转成can消息帧,传给小米电机 ② 将接收到的can消息帧通过蓝牙进行回传。如下图:
关键代码
- 将接收到蓝牙消息用TWAI发送:
unsigned int frameId = 0; int frameData[8]; for(int i = 0; i < param->write.len; i++) { printf("遍历蓝牙%d值: %d", i, param->write.value[i]); if(i < 4) { frameId = frameId * 16 * 16 + param->write.value[i]; }else { frameData[i - 4] = param->write.value[i]; } } printf("frameId%u值: %d, --- %d", frameId, frameData[0], frameData[7]); ESP_LOGI(EXAMPLE_TAG, "-----发送can数据指令------"); emitMsg(frameId, frameData); ESP_LOGI(EXAMPLE_TAG, "-----发送can数据指令结束-----");- 将收到的can信号用蓝牙转发给网页:
static void twai_receive_task(void *arg){ while (1) { rx_task_action_t action; xQueueReceive(rx_task_queue, &action, portMAX_DELAY); while(1) { twai_message_t rx_msg; twai_receive(&rx_msg, portMAX_DELAY); ESP_LOGI(EXAMPLE_TAG, "接收到can信号: %lu", rx_msg.identifier); uint8_t notify_data[8]; for (int i = 0; i < sizeof(rx_msg.data); ++i) { notify_data[i] = rx_msg.data[i]; } esp_ble_gatts_send_indicate(current_gatts_if, current_param->write.conn_id, gl_profile_tab[PROFILE_A_APP_ID].char_handle, sizeof(notify_data), notify_data, false); } } vTaskDelete(NULL);}完善前端项目
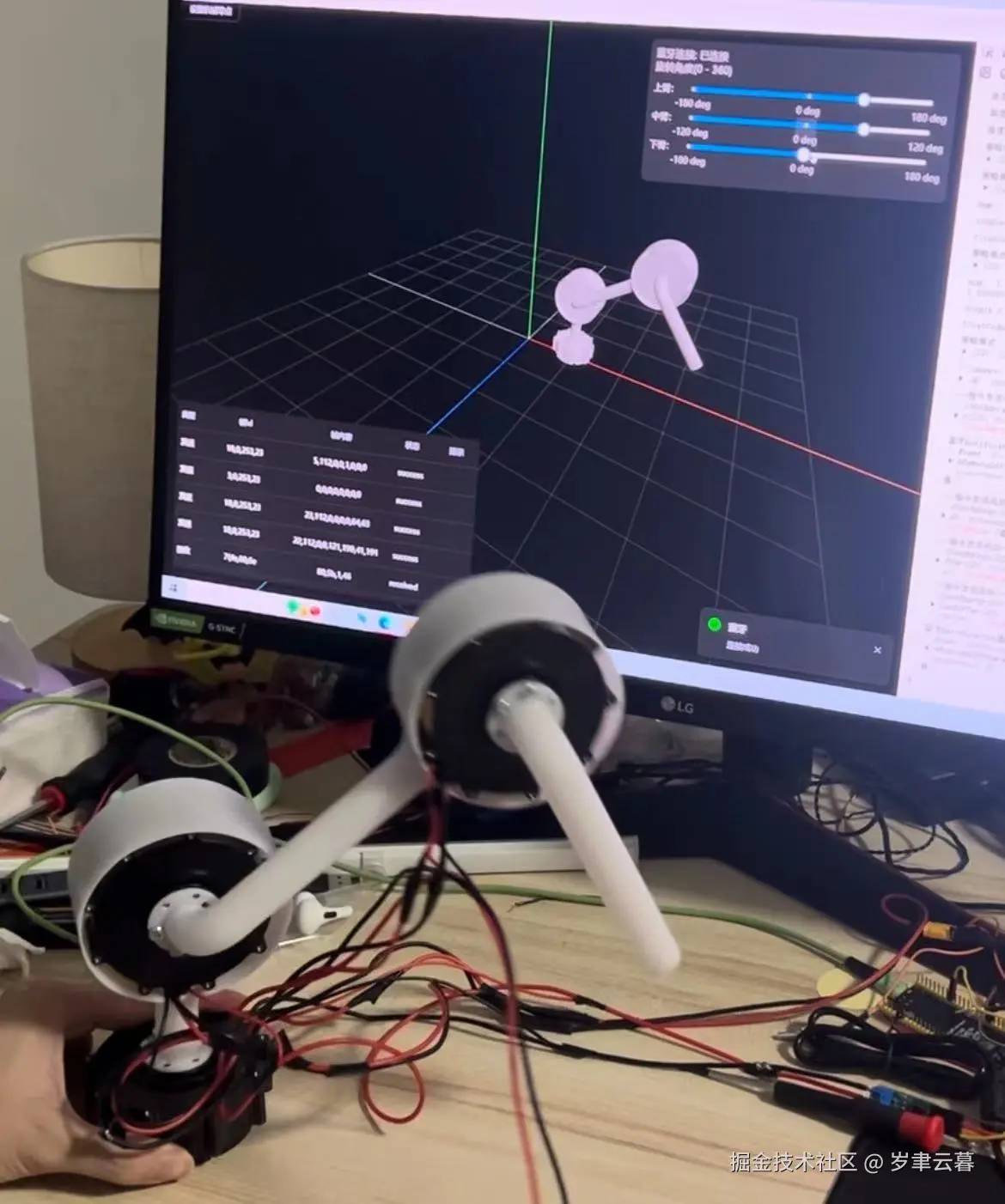
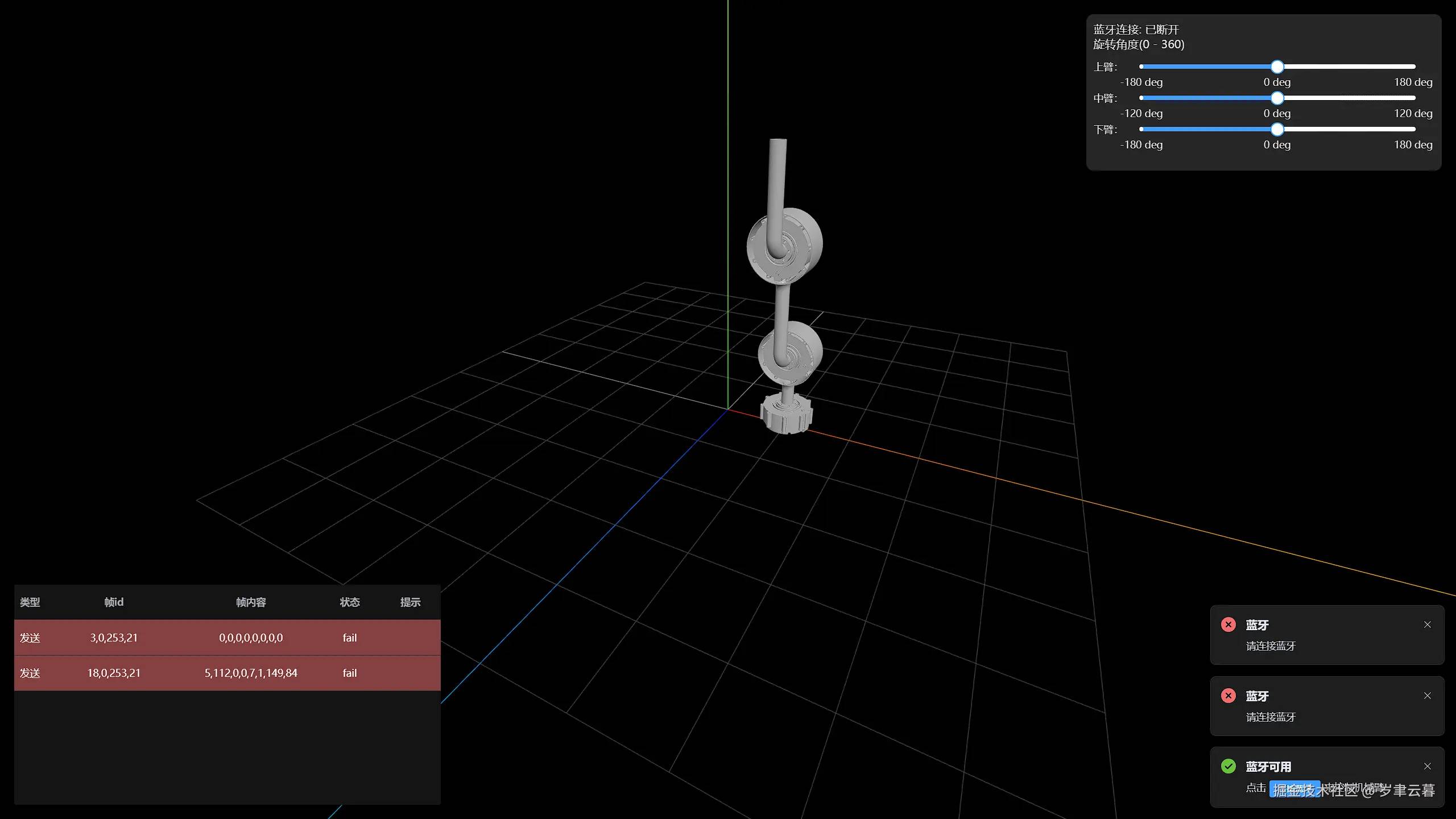
目标: 与单片机建立蓝牙通信,新增控制面板模块,用网页控制小米电机的运行。
界面如下:
关键代码:
蓝牙部分:
let available = await navigator.bluetooth.getAvailability(); ... let device = await navigator.bluetooth.requestDevice({ filters: [{ namePrefix: "ESP" }], optionalServices: [0x00ff], }); let server = await device.gatt.connect(); let service = await server.getPrimaryService(0x00ff); let characteristic = await service.getCharacteristic(0xff01); ... characteristic.writeValue(cmdFrame); ... characteristic.addEventListener("characteristicvaluechanged", (e) => { console.log("蓝牙Notification通知: ", e, "值:"); let CAN_frame_data = Array.from(new Uint8Array(e.target.value.buffer)).map( (num) => { return num.toString(16); } ); 位置模式的指令生成
看文档之后,发现位置模式是最符合网页中控制面板的操作。
- 首先看看文档解释:
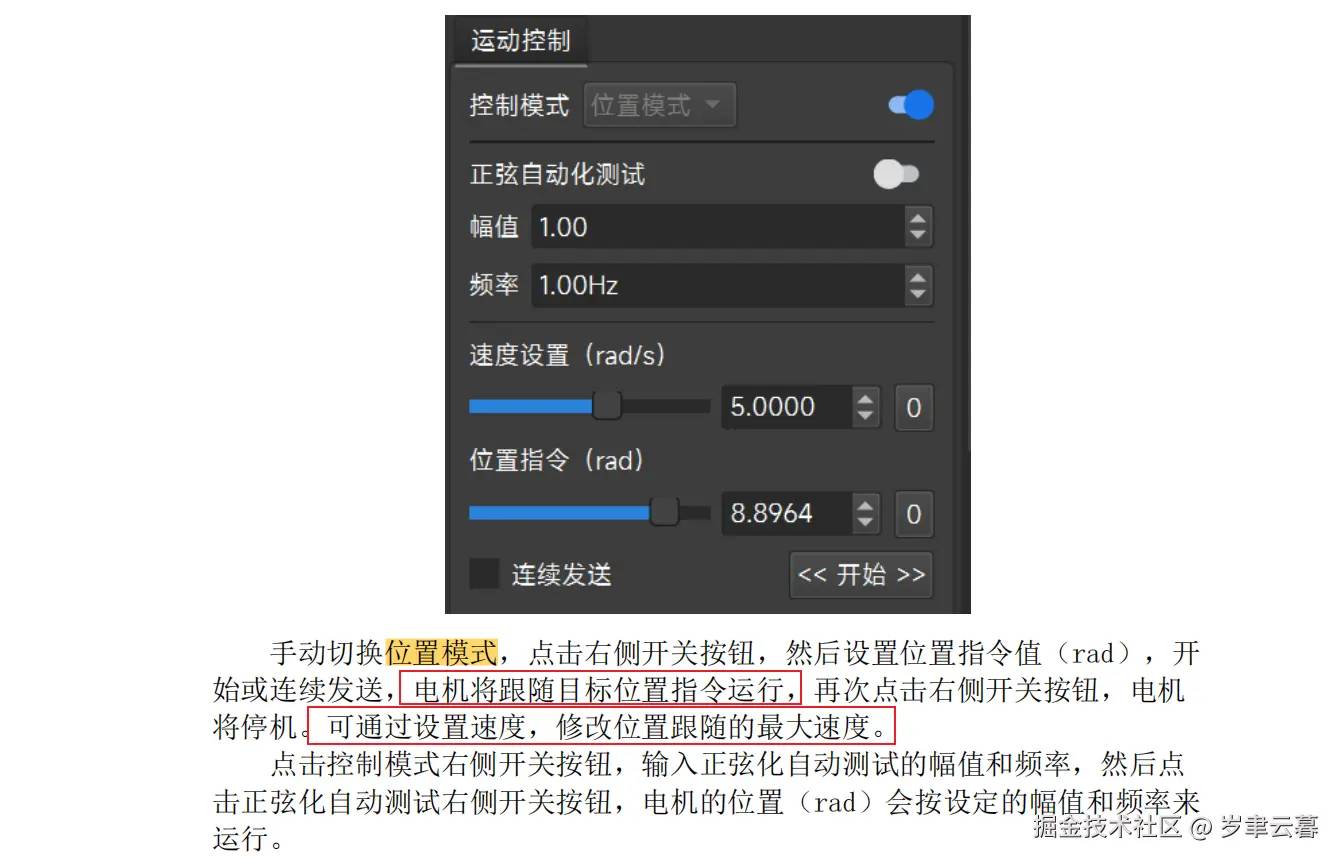
- 其次看看如何运行这个位置模式:
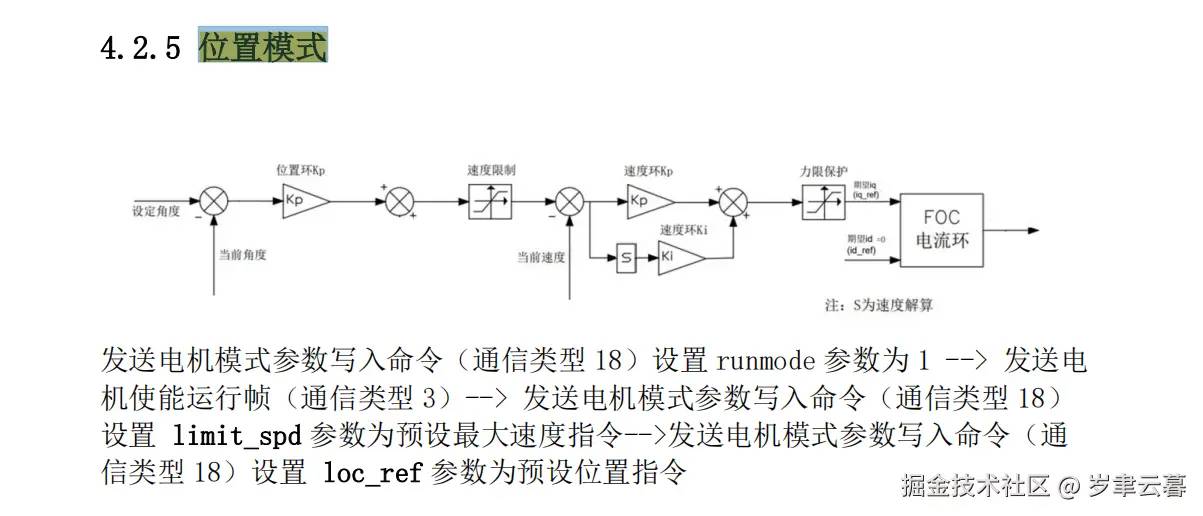 可以看到,设置位置模式主要是需要分发两条指令:①. 发送设置速度指令,即设置limit_spd②. 发送设置具体位置,即loc_ref
可以看到,设置位置模式主要是需要分发两条指令:①. 发送设置速度指令,即设置limit_spd②. 发送设置具体位置,即loc_ref
- 最后来仔细看看指令的内容:



速度指令的速度(0-30rad)需要4个字节来表示
角度指令的弧度(rad)需要4个字节来表示
- 看了这么久rad,解析下它是什么(参考文章):
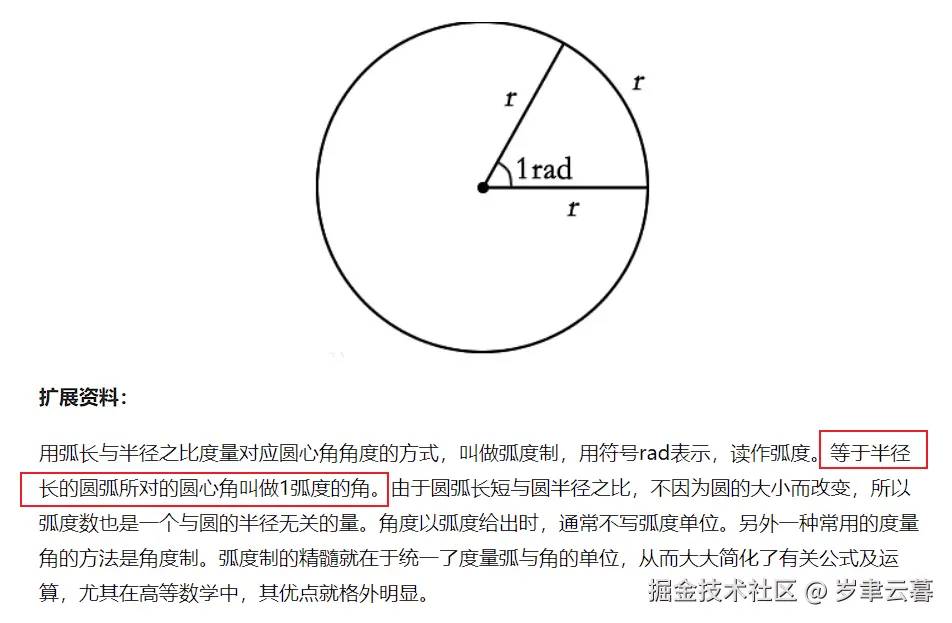
- 但是我们的控制面板用的是角度,看下互换比例(参考文章):
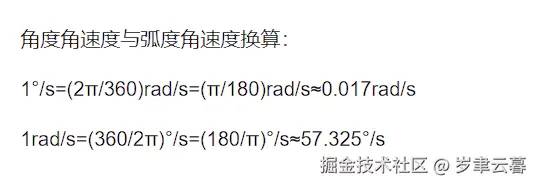
C = 2Πr, 弧度rad = 角度 * Π / 180 就行了
- 到此可以计算出角度对应弧度的值,看个指令的例子(参考文章):
CODE3:设置参数limit_spd速度5rad/s
AA 01 00 08 12 00 01 05 17 70 00 00 00 00 A0 40 7A
CODE4:设置参数loc_ref 位置12.5rad
AA 01 00 08 12 00 01 05 16 70 00 00 00 00 48 41 7A
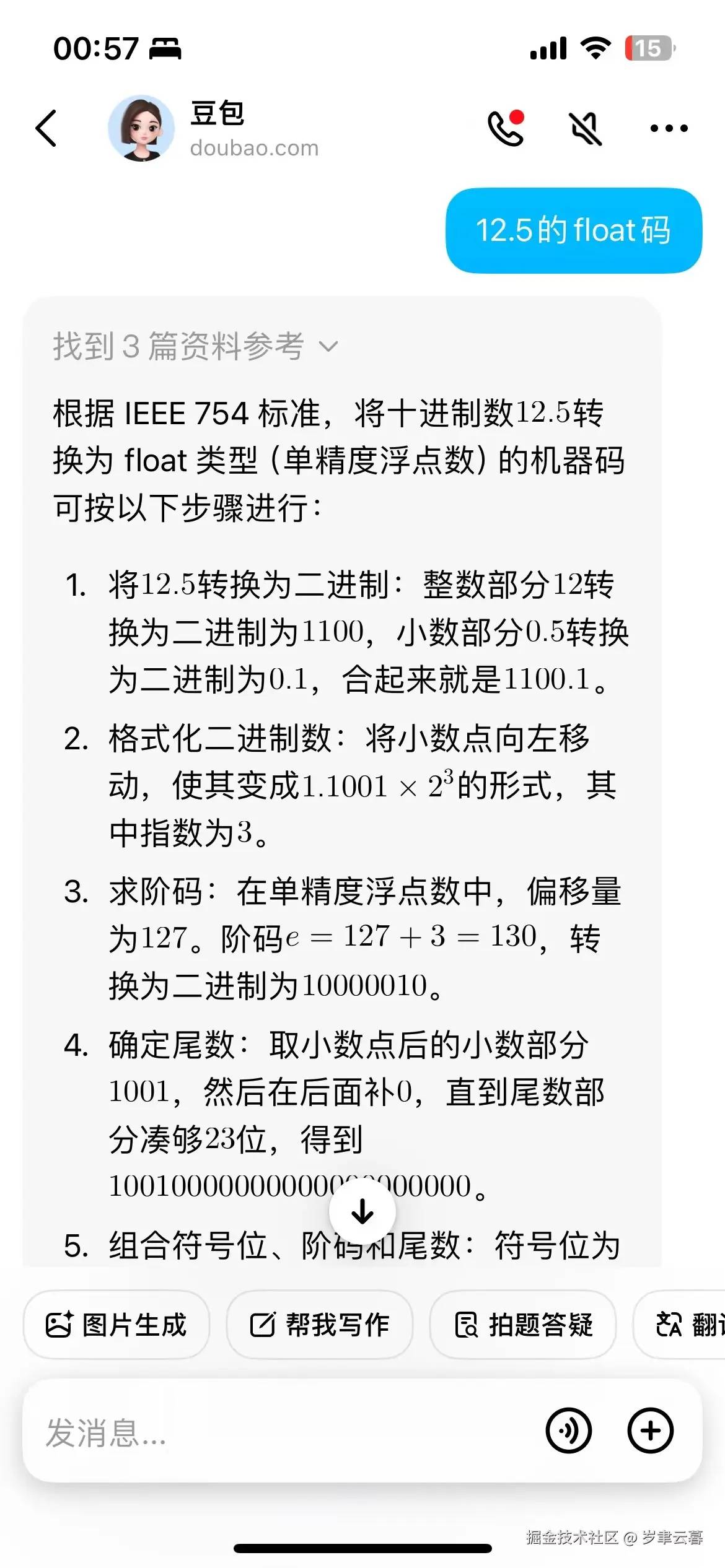
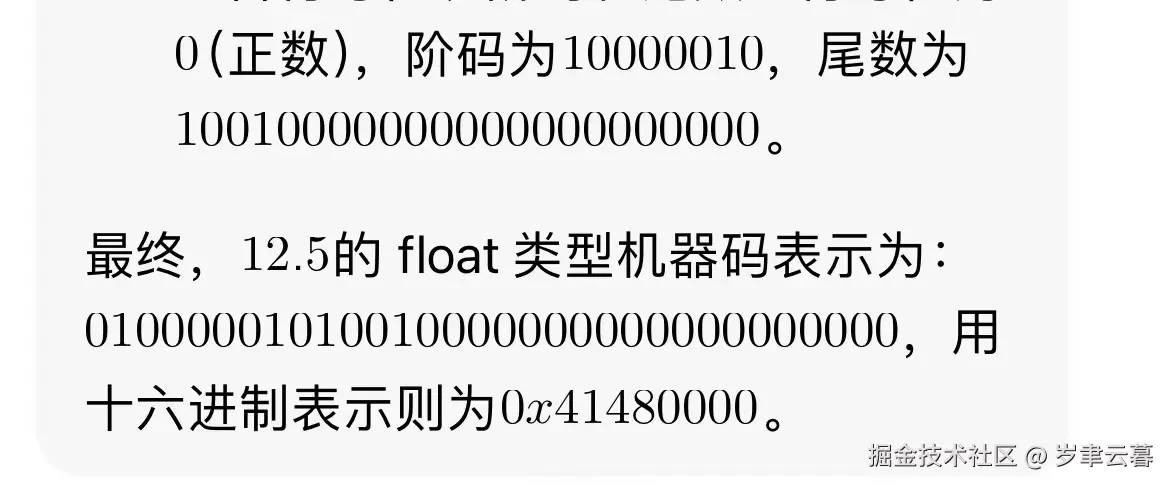
- 那如何转换成can数据帧需要的格式,比如上边例子: 5 -> 00 00 A0 40 和 12.5 -> 00 00 48 41
① 去查查这个浮点数的原理简析
②看到参考文章里的IEEE754是不是很熟悉,js的Number是遵循这个标准,那可以直接用吗?
③查了MDN:number属于64位,意味着是8个字节,与我们想要的有些不同,没发现可以如何调用的方法,遂放弃
JavaScript 的
Number类型是一个双精度 64 位二进制格式 IEEE 754值,类似于 Java 或者 C# 中的double。这意味着它可以表示小数值,但是存储的数字的大小和精度有一些限制。简而言之,IEEE 754 双精度浮点数使用 64 位来表示 3 个部分:
④ 造轮子:
export function double2floatCode(num) { if(num == 0) { return fillZero([], 32); } let num0b = (num).toString(2).replace('-', ''); console.log('num: ', num, '二进制: ', num0b); let integer0b = num0b.split('.')[0]; let fraction = num0b.split('.').length === 2 ? num0b.split('.')[1] : []; let signal = num >= 0 ? '0' : '1'; let e = 127; let first1Index = num0b.indexOf('1'); let pointIndex = num0b.indexOf('.') || 0; if(first1Index < pointIndex) { e += pointIndex - 1; }else { e += pointIndex - first1Index; } let e0bArr = e.toString(2).split(''); if(e < 128) { e0bArr = fillZero(e0bArr, 8, 'head'); } let mantissaBasis = first1Index + (first1Index < pointIndex ? 1: 0) let mantissa = [...integer0b, ...fraction].slice(mantissaBasis, mantissaBasis + 23); console.log('single', signal, 'e', e, 'mantissa: ', mantissa.join('')); const floatCodeArr = [signal, ...e0bArr, ...fillZero(mantissa, 23)]; console.log('floatCodeArr: ', floatCodeArr.join('')); return floatCodeArr; function fillZero(arr, len, type = 'tail') { if(type === 'head') { return [...new Array(len - arr.length).fill('0'), ...arr]; }else { return [...arr , ...new Array(len - arr.length).fill('0')] } }}export function numToUnit8Array(num) { let floatCodeArr = double2floatCode(num); let binaryArr = []; for(let i = 0; i < floatCodeArr.length; i = i + 8) { let binaryStr = '0b' + floatCodeArr.slice(i, i + 8).join(''); binaryArr.push(binaryStr); } return new Uint8Array(binaryArr.reverse());}⑤使用豆包ai辅助验证下函数的输出:
- 到此可以生成位置模式指令需要的数据,所以可以进行下一步:生成指令,用策略模式来优化下:
export function generateCMD(type, params = {}) { let TWAI_id = new Array(4).fill(0); let TWAI_data = new Array(8).fill(0); var Strategies = { enable: () => { TWAI_id = [0x03, 0x00, 0xfd, 0x15]; }, disable: () => { TWAI_id = [0x04, 0x00, 0xfd, 0x15]; }, jog5: () => { TWAI_id = [0x12, 0x00, 0xfd, 0x15]; TWAI_data = [0x05, 0x70, 0x00, 0x00, 0x07, 0x01, 0x95, 0x54]; }, jog0: () => { TWAI_id = [0x12, 0x00, 0xfd, 0x15]; TWAI_data = [0x05, 0x70, 0x00, 0x00, 0x07, 0x00, 0x7f, 0xff]; }, limit_spd: ({motorId, limit_spd}) => { TWAI_id = [0x12, 0x00, 0xfd, motorId]; TWAI_data = [0x17, 0x70, 0x00, 0x00, ...numToUnit8Array(limit_spd)]; }, loc_ref: ({motorId, loc_ref}) => { TWAI_id = [0x12, 0x00, 0xfd, motorId]; TWAI_data = [0x16, 0x70, 0x00, 0x00, ...numToUnit8Array(loc_ref)]; }, run_mode: ({motorId, run_mode}) => { TWAI_id = [0x12, 0x00, 0xfd, motorId]; TWAI_data = [0x05, 0x70, 0x00, 0x00, run_mode, 0x00, 0x00, 0x00]; } } Strategies[type](params); console.log('策略模式: ', type , [...TWAI_id, ...TWAI_data]); return Uint8Array.from([...TWAI_id, ...TWAI_data]);}- 运行位置模式需要四条指令: ①设置运行模式 ②使能 ③设置速度 ④设置位置 。为了方便使用,也为了未来的扩展,因为还有其他三种模式:运控模式,电流模式,速度模式。所以在此使用建造者模式来优化:
class MotorRotateBuilder { motorId cmdArr = [] setMotorId(motorId){ this.motorId = motorId; return this; } enableCmd() { this.cmdArr.push(generateCMD('enable')) return this; } disableCmd() { this.cmdArr.push(generateCMD('disable')) return this; } runModeCmd() { } coreCmd() { } getCmdArr() { return this.cmdArr; }}export class LocBuilder extends MotorRotateBuilder { constructor({ motorId }) { super(); this.setMotorId(motorId) } runModeCmd() { let cmd = generateCMD('run_mode', {motorId: this.motorId, run_mode: 1}) this.cmdArr.push(cmd); return this; } coreCmd({limit_spd, loc_ref}) { let limit_spd_cmd = generateCMD('limit_spd', {motorId: this.motorId, limit_spd}); let loc_ref_cmd = generateCMD('loc_ref', {motorId: this.motorId, loc_ref}); this.cmdArr.push(limit_spd_cmd, loc_ref_cmd); return this; }}export function LocDirector({motorId, limit_spd, loc_ref}) { if(limit_spd > 30) { limit_spd = 30; }else if(limit_spd < 0) { limit_spd = 0; } let loc_instance = LocBuilder({motorId}).runModeCmd().enableCmd().coreCmd({ limit_spd, loc_ref }); return loc_instance.getCmdArr();}- 查看生成的数据:
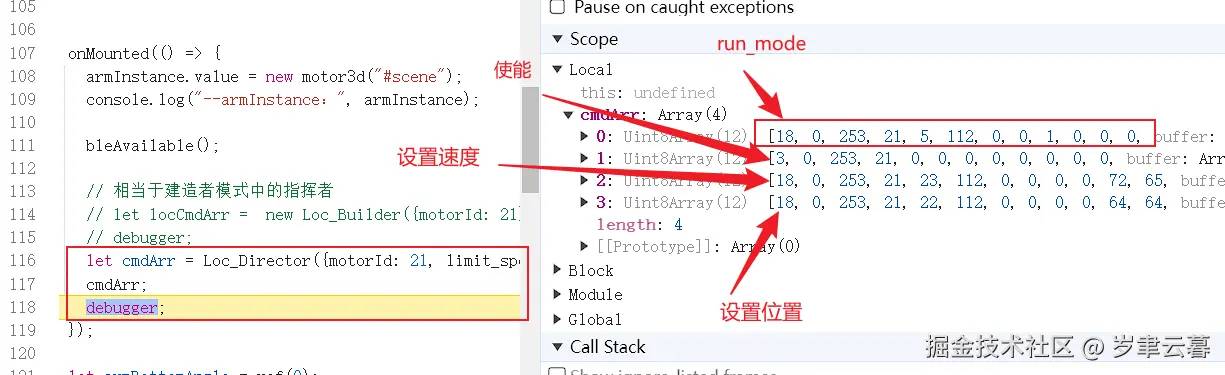 11. 发现已经生成了预期想要的数据了,接下来循环发送(暂时每条指令间隔300ms,实测不能发太快)给小米电机
11. 发现已经生成了预期想要的数据了,接下来循环发送(暂时每条指令间隔300ms,实测不能发太快)给小米电机
- 将控制面板绑定相关函数和参数,实现拨动滑块控制电机,如下图:

- 这章到此结束
组装,最终成品
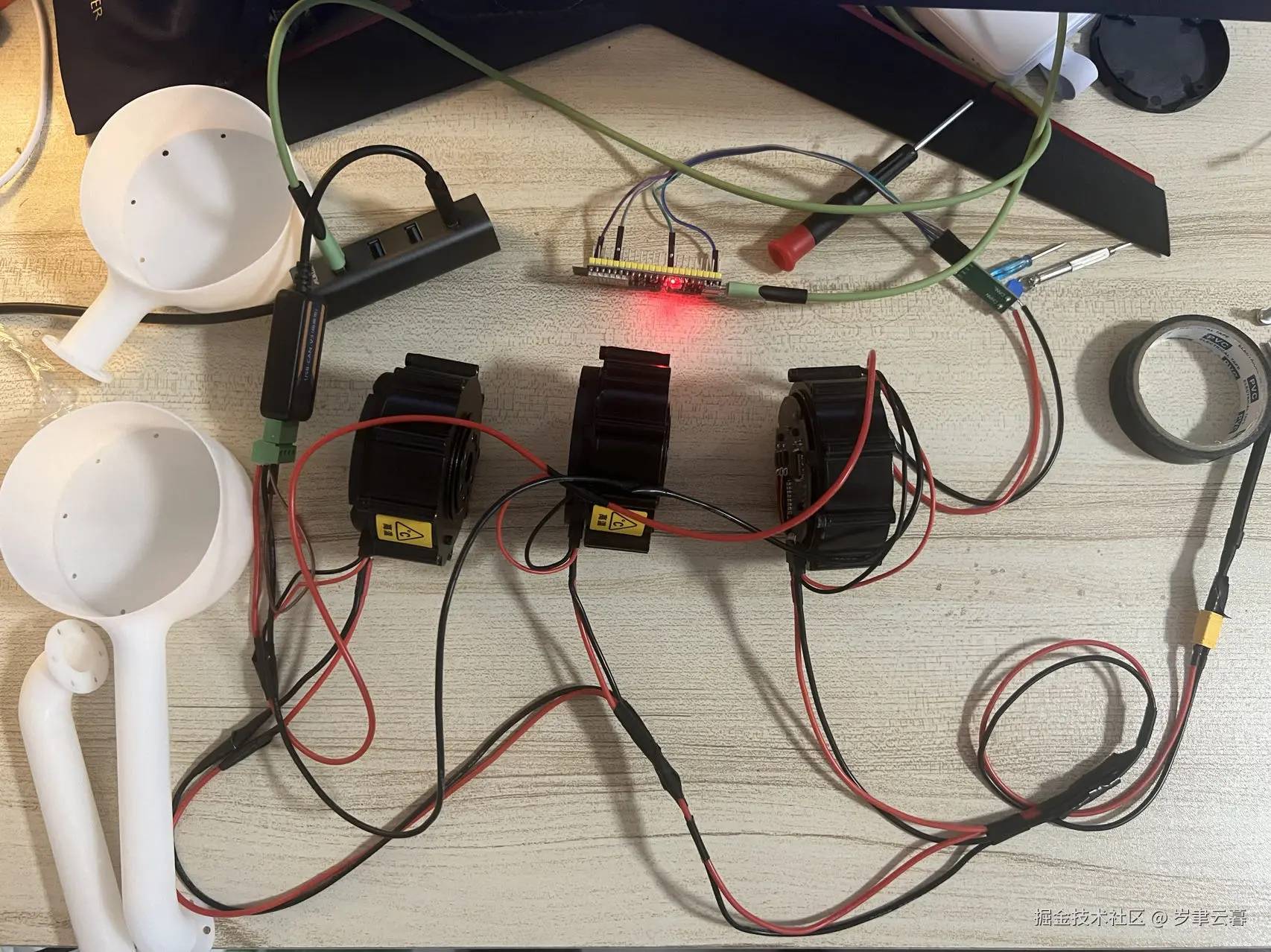
目标: 将三个电机的电源用并联方式连接起来,连接TWAI通信网络,组装上3d打印的壳子,完成最终成品。
线路连接: 如下图:
遇到的问题:
- 期间twai网络消息,只有当连接一个电机时候才可通信(查阅资料can通信在1Mbps下的通信距离能达到10公里,而我这一米不到就不行了),尝试设想很多原因,比如:
① 连线的问题,查阅资源发现要两侧添加电阻,故又去买了120欧姆的电阻。
② can通信线的问题,图中用的电源线和can线用的一个类型的线。
③ 是否是线路的电阻太高,导致线路失败。
…
最终发现是:tja1050收发器需要5v的电压供电,而esp32只能提供3.3v的电压,导致电压与电阻不匹配。那为何在之前3.3v时候也能通信工作? 查看商品详情页:
 所以,现在需要一个5v的电源(12v电源转5v)如下:
所以,现在需要一个5v的电源(12v电源转5v)如下:

- twai单片机项目问题,由于是之前拷贝官方项目改的,达到了能简单运行的目标。但现在经常发送can报文时候报错,但官方的代码太过复杂,无法正确有效修改,到了不得不解决的时候了。于是重写该部分项目代码:待写文章。
- 蓝牙经常会爆内存,导致单片机直接重启。解决方法是 ① menuconfig中调整蓝牙的BTC_TASK的栈容量 ② 官方项目会把蓝牙接收到write消息写入单片机的持久化磁盘中,在此优化部分逻辑并删掉相关代码。
组装后的成品:

存在的明显问题:
- 设计的3d模型存在很多问题,比如重心偏移站不住,电线无法走线,螺丝孔不好安装等,基本一整个都有问题,需要重新设计和做仿真测试。
- 蓝牙的交互还存在问题,消息发快点就不行了,需要优化。
- can信号的发送丢失严重,不知道是什么原因。
- 操作体验优化,目前由于蓝牙和can网络,导致数据交互有点慢。
- 网页的接收数据模块(左下角那块)需要优化,目前有点鸡肋。
总结
从5.16做到8.06,接近三个月,做的东西太粗糙了,没想象中的好,但主要逻辑是通的,勉强算完成吧。
未来展望
如果都做的顺利的话,下一个可能会做灵巧手,如下图:

github
地址: github.com/5sj-666/Rob…
参考文章
SolidWorks 打开stp/step不显示解决办法: zhuanlan.zhihu.com/p/661600802
机械臂cad参考: github.com/Tony607/Cyb…
esp 指南: docs.espressif.com/projects/es…
awg解释: baike.baidu.com/item/AWG/36…
螺纹孔深度标注: zhidao.baidu.com/question/16…
esp32 can总线: lastminuteengineers.com/esp32-can-b…
idf指令: docs.espressif.com/projects/es…
threejs在vue中用法: cloud.tencent.com/developer/a…
机械臂控制: www.cnblogs.com/zhnblog/p/6…
esp-idf readme: github.com/espressif/e…
esp32-tja1050: lingshunlab.com/book/esp32/…
蓝牙角色区分: blog.csdn.net/weixin_4335…
蓝牙术语解读: www.nordicsemi.cn/news/blueto…
蓝牙ATT介绍(英文版本): lpccs-docs.renesas.com/tutorial-cu…
PC蓝牙调试器: blog.csdn.net/Ikaros_521/…
STM32F103用CAN通讯驱动小米电机讲解: www.bilibili.com/video/BV1Z1…
小米电机指令详解: blog.csdn.net/qq_35003234…
详解蓝牙传输: blog.csdn.net/chengbaojin…
通过web控制蓝牙设备(入门): segmentfault.com/a/119000001…
float浮点数原理: blog.csdn.net/whyel/artic…
rad详解: blog.csdn.net/janechel/ar…
设置BTC_TASK大小: docs.espressif.com/projects/es…
获取twai状态:blog.csdn.net/HeroGuo_JP/…