包阅导读总结
1. 关键词:Waymo、自动驾驶、生成式AI、仿真技术、规模定律
2. 总结:本文是Waymo联合首席执行官Dmitri Dolgov与a16z合伙人David George的对话,涵盖了Dmitri在自动驾驶领域的职业经历,探讨了生成式AI与传统技术融合、仿真技术重要性、集成挑战、现实中的自动驾驶及Waymo未来之路等,强调了自动驾驶发展中的困难与突破。
3. 主要内容:
– 早期职业探索
– 2007年参与DARPA城市挑战赛,开启自动驾驶领域之旅
– 从DARPA挑战赛到谷歌自动驾驶项目,再到Waymo
– GenAI与AI/ML的融合创新
– 介绍AI在自动驾驶中的发展,如卷积神经网络和Transformers的影响
– 强调模型规模扩大及视觉语言模型融合的重要性
– 仿真技术的重要性
– 模拟器需高度逼真,能模拟传感器和动态行为
– 仿真可用于评估驾驶员系统性能、探索事件长尾等
– AI在自动化系统中的集成挑战
– 非端到端与其他方法的二元对立,而是两者结合
– 解决完全自动驾驶的难题需要更多工作
– 现实世界中的自动驾驶
– 接送乘客等问题复杂但对用户体验至关重要
– 自动驾驶里程及安全性数据
– Waymo未来之路
– 构建通用驾驶员,应用于多种商业场景
– 探讨市场推广策略和合作模式
– 传感器的选择和发展
思维导图: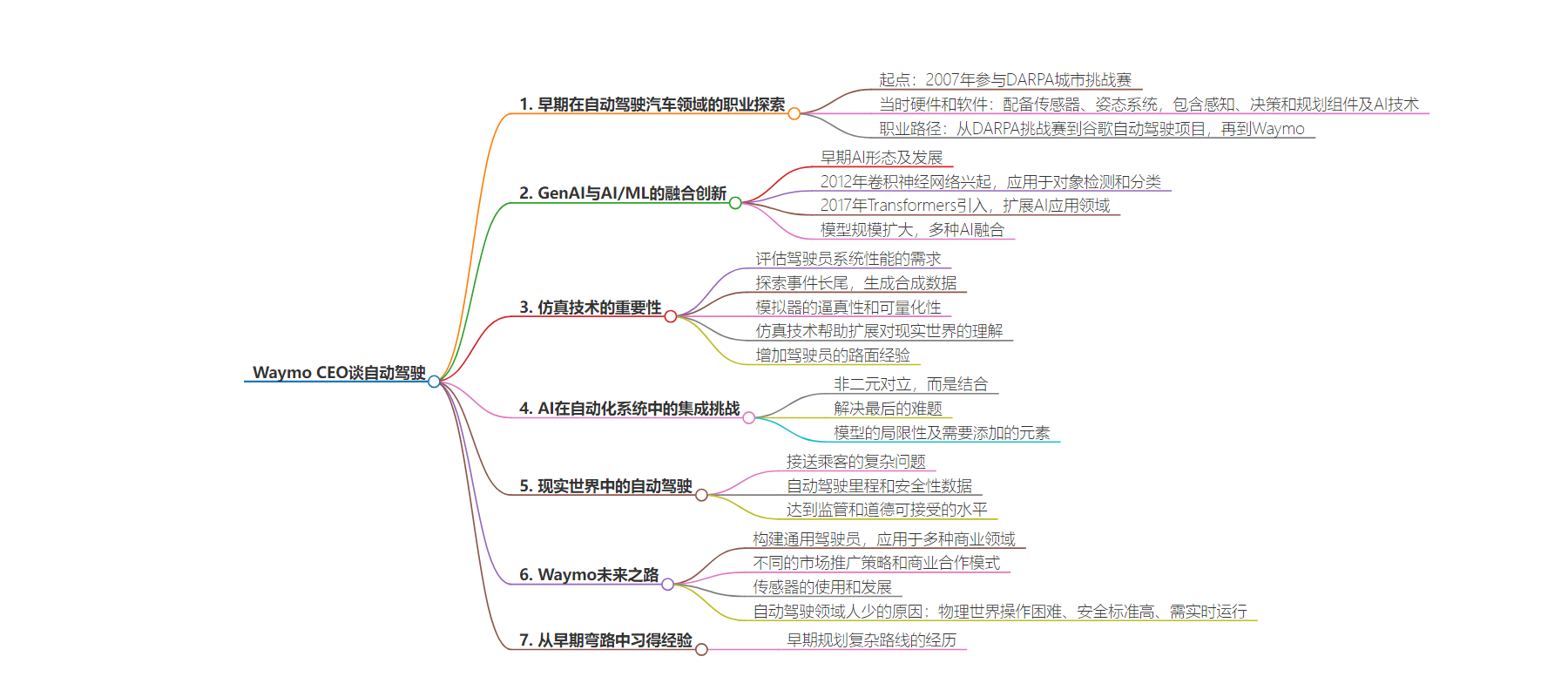
文章地址:https://mp.weixin.qq.com/s/OU9bc-vyJHNjUcY5QBoCnQ
文章来源:mp.weixin.qq.com
作者:a16z
发布时间:2024/8/13 2:58
语言:中文
总字数:10268字
预计阅读时间:42分钟
评分:78分
标签:自动驾驶,大模型,生成式 AI,Waymo,仿真技术
以下为原文内容
本内容来源于用户推荐转载,旨在分享知识与观点,如有侵权请联系删除 联系邮箱 media@ilingban.com
图片来源:a16z
Z Highlights
-
大约在2012年,AI和计算机视觉领域发生了一个重大突破,卷积神经网络的兴起。可以利用卷积神经网络来解释周围环境,无论是通过摄像头、激光雷达还是成像雷达进行对象检测和分类。在2017年左右,当时引入了transformers。这一技术对语言理解、语言模型和机器翻译等领域产生了深远的影响,它真正地将机器学习和AI的应用扩展到了感知之外的新领域。
-
模拟器必须是高度逼真的。它在模拟传感器或感知现实方面必须是逼真的,也必须在观察到的其他动态行为方面是逼真的。如果其他参与者的行为不真实,比如行人的走路方式与现实世界不同,那么你需要能够将创建的模拟场景与现实世界的真实性和发生率进行量化。
-
我们从早期的LLM浪潮中观察到,已经出现了一场巨大的成本降低竞赛。许多人认为这是一种商品化过程,尽管还处于早期阶段。而多年来,我们对自动驾驶的观察恰恰相反。这个领域的人越来越少。
早期在自动驾驶汽车领域的职业探索
David George:我们可以从斯坦福大学谈起吗?那是你第一次参与DARPA(美国国防高级研究计划局)项目的时候,能否分享你从那时起的职业历程?
Dmitri Dolgov:我初次接触自动驾驶汽车是在斯坦福大学博士后期间,正如David你所提到的。我非常幸运地赶上了那个特殊的时期。当时,DARPA正在举办一系列竞赛,以推动自动驾驶技术的发展。我参与的是2007年的DARPA城市挑战赛。
那时的竞赛设置,与我们今天所做的相比,看起来更像是一个玩具版本。它旨在模拟城市驾驶环境,组织者在一座废弃的空军基地构建了一个模拟城市,邀请了自动驾驶汽车和人类驾驶员参与完成各种任务。这便是我踏入自动驾驶领域的起点。业界普遍认为DARPA的这些挑战赛是整个领域发展的关键基石,对我而言,这确实是一个关键的转折点。那一刻,我被深深吸引,仿佛点亮了一盏明灯。
David George:2007年时,你们使用的硬件和软件是怎样的?
Dmitri Dolgov:从高层次来看,与我们今天讨论的技术相似。我们有一辆装备了传感器的汽车,可以向它发出指令并接收反馈。然后是一套姿态系统,包括惯性测量单元、加速度计、陀螺仪,它们与GPS协同工作,告诉你在空间中的位置和移动情况。车上配备了传感器、雷达、激光雷达和摄像头——这些设备我们今天仍在使用。计算机接收传感器数据,然后指导汽车的行动,背后是一系列软件的支持。软件包括感知组件、决策和规划组件,以及一些人工智能技术。
当然,从那时起到现在——已经过去了将近18年甚至更久——我们拥有的每一项技术都经历了巨大的变革。所以当我们讨论今天的AI与2007年、2009年的AI时,它们之间几乎没有任何共同点。其他所有方面也都发生了变化,包括传感器和计算机。
David George:所以那是你的顿悟时刻,然后你决定,“好,我在斯坦福,我要将此作为我的事业”,对吧?接着是丰田,之后你的职业路径又是怎样的?
Dmitri Dolgov:我不确定我是否那样规划过。我当时的想法是,“这是未来。我想要实现它,我想要构建它。我迫不及待地想要开始。”但那是下一步的重要一步,我们中的一些人从DARPA挑战赛中走出来,参与了谷歌自动驾驶项目。大约有十几个人,在2009年,我们在谷歌的积极支持和Larry Page(Google创始人之一)与Sergey Brin(Google创始人之一)的的热切期待下聚集在一起,探索如何将这项技术提升到新的阶段。我们在该项目上工作了几年,然后该项目在2016年发展成为Waymo,从那时起,我们一直在沿着这条道路前进。
GenAI与AI/ML的融合创新
图片来源:Unsplash
David George:我们最近在生成式AI领域取得了显著进展。有人将其视为全新事物,而有人则认为它已经发展了70年。你如何看待将这些生成式AI的突破与那些被广泛认为更传统的AI或机器学习技术相结合,这些技术一直是自动驾驶技术的核心?
Dmitri Dolgov:好问题。生成式AI是一个包罗万象的概念。我们不妨先退一步,探讨AI在自动驾驶汽车中的应用,以及我们如何将AI的各种创新与我们的任务领域相融合。正如你所提到的,AI自早期以来就与自动驾驶汽车的发展紧密相连。起初,它是一种截然不同的AI形态,机器学习,包括经典的决策树、经典的计算机视觉,具有手工设计的特征、核函数等。然后,大约在2012年,AI和计算机视觉领域发生了一个重大突破,这对我们的领域尤为重要,那就是卷积神经网络的兴起。
许多人可能对AlexNet和ImageNet竞赛有所了解。AlexNet的表现超越了所有其他参赛方法。显然这在我们的领域有很强的应用性,比如你如何进行计算机视觉,不仅仅是在相机上对吧?你可以利用卷积神经网络来解释周围环境,无论是通过摄像头、激光雷达还是成像雷达进行对象检测和分类。这在2012年到2013年间是一个巨大的飞跃。随后,我们尝试将卷积神经网络应用于感知之外的其他领域,并取得了一些有趣但有限的成果。
另一个关键的突破发生在2017年左右,当时引入了Transformers。这一技术对语言理解、语言模型和机器翻译等领域产生了深远的影响。对我们来说,这是一个极为重要的进步,它真正地将机器学习和AI的应用扩展到了感知之外的新领域。如果你考虑Transformers对语言的影响,它们在理解、预测和生成词序列方面表现出色。
在我们的领域,我们关注的是理解和预测人们的行动,比如场景中的其他参与者,或者决策和规划自己轨迹的任务。或者在模拟环境中,生成GenAI,我们所理解的生成式AI,是生成世界如何演变的行为序列。这些序列与句子并无二致。你在操作对象的状态,存在局部连续性,但场景的全局上下文同样重要。因此,在行为预测、决策制定和仿真方面,我们见证了一些非常激动人心的创新。
自那时以来,我们见证了模型规模不断扩大的趋势。人们开始构建能够处理多种任务的基础模型。近年来,所有大型语言模型的突破、现代状态、现代生成式AI、视觉语言模型,你可以看到图像理解和语言理解之间的对齐。最近让我特别兴奋的是这两者的融合。这是我们在Waymo非常关注的一个领域,即将AI的核心能力与我们在Waymo多年来建立的、非常擅长自动驾驶任务的AI结合起来,与通用世界知识和这些VLMs(视觉语言模型)的理解相结合。
仿真技术的重要性
David George:你之前提到的仿真技术及其在自动驾驶中的应用非常关键。你们在使用仿真方面取得了重大突破。在近期生成式AI最近的突破中,围绕合成数据的有用性存在一些争议。但在你们的领域,合成数据和仿真的概念是非常有价值的。能否请你谈谈你们是如何构建仿真技术,它如何帮助你们扩展对现实世界的理解,以及这些年来它的发展变化?
Dmitri Dolgov:在我们的领域,仿真技术非常重要。基本上,如果你要评估一个驾驶员系统的性能,你如何判断它是否足够优秀?你如何回答这个问题?这需要建立一系列的指标和数据集。然后,你如何评估你系统的最新版本?你不能简单地将其投放到现实世界中,看看会发生什么。你必须在模拟环境中进行测试。当然,新系统的行为可能与现实世界中可能发生的情况有所不同。因此,你需要一个高度逼真的闭环模拟环境,以确保你对其有足够的信心。
这是仿真技术最重要的需求之一。你还提到了合成数据,这是仿真技术能够提供高效益的另一个领域。你需要探索事件的长尾(ZP注:那些原来不受到重视的销量小但种类多的产品或服务由于总量巨大,累积起来的总收益超过主流产品的现象。在互联网领域,长尾效应尤为显著)。也许你在现实世界中观察到了一些有趣的现象。但如果你想修改一个场景,将其转化为数千甚至数万个场景的变体,你该如何操作?这正是仿真技术发挥作用的地方。
最后,有时你想要评估和训练一些你从未见过的情况,即使我们有非常丰富的经验。这就是纯粹的合成模拟的作用,它不基于任何现实世界中的观察。涉及的技术非常多,这是一个巨大的生成式AI问题。但最重要的是,模拟器必须是高度逼真的。它在模拟传感器或感知现实方面必须是逼真的,也必须在观察到的其他动态行为方面是逼真的。如果其他参与者的行为不真实,比如行人的走路方式与现实世界不同,那么你需要能够将创建的模拟场景与现实世界的真实性和发生率进行量化。
在模拟器中创建一些完全荒谬的场景是不合理的,但如果你这样做了,你该如何处理?所以我认为这引出了我关于现实性的第三点思考,即它必须在宏观层面、统计层面是现实可量化的。你可以想象,构建一个大规模的、在这些类别中具有这种真实度的模拟器需要大量的工作。直观地说,要构建一个好的驾驶员,需要有一个非常好的模拟器,但要有一个好的模拟器,实际上必须构建逼真的行人、骑行者和司机的模型。所以最好以迭代的方式去做。
David George:是的,当然。通过这种非常擅长模拟现实世界并且非常实用的模拟软件,你可以在场景中创建变量,实际上可以给驾驶员提供更多的路面经验。
Dmitri Dolgov:完全正确。
David George:在实际行驶里程中,是这样吗?
Dmitri Dolgov:完全正确。我们在现实世界中行驶了数千万英里,目前我们已经在全自动驾驶模式下行驶了超过1500万英里,我们称之为“仅乘客模式”,但我们在仿真环境中行驶了数百亿英里,极大地扩大了我们的数据规模。
David George:谈到行驶里程的倍数,今天AI世界中热议的话题之一是规模定律这个概念。那么你如何看待与自动驾驶相关的规模定律?是行驶里程吗?是某种经验的增加吗?是计算能力吗?你如何看待这些问题?
Dmitri Dolgov:模型的大小确实很重要。我们说规模定律是适用的,许多传统的旧模型严重欠缺训练。如果拥有更大的模型,数据实际上会有所帮助,因为模型有更大的容量,泛化能力更好。所以我们看到规模定律在这方面是适用的。数据当常很重要,但不仅仅是计算里程或小时数,它必须是正确类型的数据,教会模型或训练模型在你关心的罕见情况下表现良好。然后有一点小问题,因为你可以构建那些非常大的模型,但在我们的领域,它必须运行在车上,所以在某种程度上受到计算能力的限制,必须提炼到车载系统中。但我们确实在我们的领域中看到一个普遍的趋势,训练一个巨大的模型然后将其提炼成一个小模型比直接训练小模型要好得多。
AI在自动化系统中的集成挑战
David George:让我们换个话题,做一个可能让你抓狂的简化陈述。DARPA的思路是一种基于规则的方法。一种更传统的基于AI的方法,涉及大量的数据量,记录边缘案例,然后模型学习如何应对这些情况。一些其他大型公司和初创公司的最新方法是:“嘿,我们从一开始就使用AI,端到端做出所有决策,不需要所有这些模式识别和学习,就像端到端驾驶那种口号一样。”你如何解读这种方法,以及你从这种方法中吸取了哪些元素并应用于Waymo?
Dmitri Dolgov:是的,有时候当人们讨论这个问题时,会出现一种奇怪的二元对立,非此即彼。
David George:是的,当然。
Dmitri Dolgov:但事实并非如此,它是此和彼的结合。所以这是大模型,是端到端模型,是生成式AI,是将这些模型与视觉语言模型结合起来。但问题是还不够,我们都知道这些模型的局限性。这就是我们多年来看到的,人工智能的许多突破。超大规模云服务商,Transformers,大型端到端基础模型,对我们来说是巨大的推动。而Waymo在整个项目过程中一直在做的是不断地应用和推进这些最先进的技术,并从案例中吸取经验,然后将它们应用到我们的领域。从中我们也认识到,它们确实带来了巨大的提升,但还不够。
这个领域始终是这样的:你可以轻易地将最新的尖端技术应用于实践,开始起来相对容易。进步的曲线看起来是这样,曲线在它们的塑造中,但真正的挑战在于解决那最后的0.0001%的难题。这远远不够,必须在这个基础上做得更多。如今,你可以采用一个端到端的模型,从传感器到行驶轨迹或驾驶决策。通常这些模型通常不是一蹴而就构建的,而是通过分阶段开发,但你可以通过整个过程进行反向传播。这个概念本身是非常有力的。结合一个视觉语言模型,并引入闭环仿真,就可以开始了。你可以有一个很棒的演示,几乎可以说是即插即用。你可以有一个ADAS或驾驶辅助系统,但这还不足以实现完全自动驾驶。真正的难题在于此。
所以问题不在于是此还是彼,而是还需要什么才能确保你可以真正去掉驾驶员,实现完全的自主驾驶?这是一个巨大的工作量,涉及到这些模型和整个系统的整个生命周期。所以从训练开始,比如如何训练?如何构建这些模型?如何评估它们?然后,如果你放入一个更大的系统,模型本身是不够的。所以你必须围绕它们做一些事情。现代生成式AI很棒,但存在一些幻觉问题。
David George:幻觉,可解释性。
Dmitri Dolgov:完全正确。它们在目标导向的规划、政策制定以及在这个3D空间世界中操作方面存在一些弱点。所以你必须在此基础上添加一些东西。我们稍微谈到了模拟器。这本身就是一个非常困难的问题。一旦你有了某种东西,一旦你部署并了解了,你如何反馈?这就是所有真正困难的工作所在。所以这不是端到端与其他东西的对立,而是端到端和大型基础模型,然后才是其他艰苦的工作。
David George:然后才是所有艰苦的工作。是的,完全说得通。这很好地过渡到了你们取得的所有进展。乘坐Waymo是一种非凡的体验。这并不是说你们已经解决了所有这些复杂的任务,但你们已经解决了其中很多。你们认为今天仍然面临的最大AI或数据问题是什么?
Dmitri Dolgov:简短来说是需要将规模提升到下一个数量级,甚至是多个数量级。随之而来的是我们需要做出额外的改进,以提供更好的服务。但为了确定我们目前所处的位置,我们在各种条件下驾驶。我们在旧金山和凤凰城(这是最成熟的市场)实现24/7全天候驾驶,同时也在洛杉矶和奥斯汀。你在城市里开车时遇到的所有复杂情况:各种天气条件,无论是雾、暴风雨、沙尘暴还是这里的暴雨,我们都在这些条件下操作。
所以然后我想到了什么造就了良好的客户体验。如果你增长到下一个数量级,你需要做哪些改进?我们希望做出很多改进,使其成为从A点到B点更好的服务。我们从乘客那里征求反馈,得到的很多反馈都与接送地点的质量有关。因此,我们正在加深对用户的了解,我希望从你在手机上启动应用程序到进入车站,整个过程都是神奇、无缝且愉快的体验。所以,这就是我们目前正在做的很多工作。
现实世界中的自动驾驶
图片来源:Unsplash
David George:接送乘客确实是一个极其复杂的问题。比如,在城市里,你可能会稍微挡住别人的车道,然后传感器突然提示,有人正在开车门,你需要让开。这时候,你该驶离多远才合适?或者,如果你在停车场,应该停在哪里?这个问题非常棘手,但正如你所说,对于用户体验来说,它至关重要。
Dmitri Dolgov:完全正确。我认为这是一个很好的例子,说明为了打造一款出色的产品,我们需要构建许多要素。不仅仅是一个技术演示。我认为你准确地指出了几个关键点:看似简单的问题,实际上非常复杂。我知道地图上有一个地点,我需要停下来,这看起来很简单。但实际上,在复杂密集的城市环境中,存在许多因素。你会挡到其他车辆吗?有没有车库门正在打开?对用户来说最方便的接送地点在哪里?因此,这真正涉及到深入理解驾驶任务的语义和动态特性,以及如何安全、舒适和可预测地执行操作,最终带来愉悦、无缝的客户体验。
David George:当然。好的,所以你提到了这个数据,1500万英里,我知道这个数字可能比这大一点,但你们周二发布了这个数据,这个数字每天都在增长。1500 万英里的自动驾驶里程,这太不可思议了。更令人印象深刻的是,你还没有分享这个数据,它导致的意外比人类司机少 3.5 倍,对吗?
Dmitri Dolgov:我认为3.5倍是伤害的减少,然后是低严重性事件的警方报告减少了约2倍。
David George:这涉及到监管和商业或道德判断的问题。你想要达到的水平是什么?显然,你想不断变得更好,但有没有一个水平你可以说,“好吧,我们足够好了”,这是监管机构可以接受的?
Dmitri Dolgov:所以并没有非常简单、简短的答案。我认为这从你刚刚提到的那些统计数据开始。归根结底,我们关心的是道路更安全。所以当你看到那些数字,在我们目前运营的地方,我们有强有力的实证证据表明,我们的汽车在那些地区比人类驾驶员更安全。总体而言,这意味着减少了碰撞和伤害。实际上,根据我们最新分享的数字,随着我们的服务规模的扩大和增长,我们一直在持续分享数字。如果你还能从另一个角度来看你对碰撞的贡献有多大?
我们实际上发布了一项基于大约400万英里、380万英里的研究,与瑞士再保险公司合作,我认为这是世界上最大的全球再保险公司。他们的看法是,你知道,谁对一个事件做出了贡献。我们看到了相同的主题,但数字非常强劲。这个新领域财产损失碰撞减少了76%,人身伤害索赔减少了100%。因此,如果您引入这种视角,我认为这个故事会变得更加引人注目。
David George:这非常吸引人。
Dmitri Dolgov:对,但有些碰撞事件中,大部分情况,我们会在红灯处停下来,然后有人就突然撞上你,对吧?
David George:当然。
Dmitri Dolgov:但我们知道这是一个新技术,一个新产品,所以它被要求达到更高的标准。所以当我们考虑我们的安全和准备方法时,我们不仅仅是看这些数据,对吧?多年来,我们在这方面进行了巨大的投资和经验积累,了解还需要什么。我们做了许多其他不同的事情,并分享了我们的一些方法,分享了我们的准备框架。我们不仅在统计上,而且在具体事件上,构建了一个专注的,非常优秀的人类驾驶员模型,没有分心。你知道,这是一个好问题,这样的驾驶员是否存在,对吧?但这就是我们与其进行比较的标准。然后在这种特定情况下,我们评估自己与这个人类驾驶员模型的表现,并以与这个非常高标准相比的表现为标准。然后,我们追求其他验证方法。这是我们综合考量所有这些方法后,决定系统是否准备好大规模部署的依据。
Waymo未来之路
图片来源:Unsplash
David George:我很想听听你对今天和未来市场结构、竞争以及你希望Waymo扮演什么角色的看法。
Dmitri Dolgov:我们认为Waymo正在构建一个通用驾驶员。这是核心,是实现安全便捷交通的核心使命。今天我们讨论的是叫车服务,这是我们主要的、最成熟的主要应用。但我们设想未来Waymo驾驶员将部署在其他商业应用中,比如送货、卡车运输和个人车辆。
因此,在所有这些领域,我们的指导原则是以加速该技术普及和广泛部署为目标制定市场推广策略,当然,同时要逐步、审慎、安全地进行。因此,以这一指导原则为基础,我们将探索不同的商业结构和合作模式。例如,我们在凤凰城的乘车服务与Uber合作,包括Uber乘车和 Uber Eats。因此,在凤凰城,我们有自己的应用程序。您可以下载 Waymo 应用程序并乘坐我们的车辆前往目的地。这是体验我们产品的一种方式。
另一种方式是通过Uber应用程序。我们与Uber合作,你可以通过Uber应用程序使用我们的Waymo驾驶员和Waymo车辆,体验相同服务。但这对我们来说是加速并让更多人体验完全自动驾驶的另一种方式。它让我们有机会考虑不同的市场推广策略。一种是我们拥有更多的自有应用程序,另一种是为其他人的网络提供更多“驾驶员即服务”。我们将早早开始,不断迭代,并始终服务于主要原则。
David George:太棒了,这会非常激动人心。回到车辆的话题,你们使用的硬件堆栈怎么样?从DARPA开始,基本上还是同样的东西。它们有了相当大的进步,但你们仍然使用雷达和激光雷达。你认为激光雷达具体来说,仍然是自动驾驶的未来之路吗?
Dmitri Dolgov:我的意思是,传感器在物理上是不同的。它们各有优点:摄像头、激光雷达、雷达,每个都有自己的优势。摄像头显然能提供颜色和非常高的分辨率。激光雷达为您提供环境的直接 3D 测量,它们是主动传感器。因此,它可以带来自己的能量,在没有外部光源的漆黑环境中,您仍然可以像白天一样清楚地看到周围环境,甚至在某些情况下更好。
然后雷达在穿透方面非常好,只是物理上波长不同。所以如果你构建一个成像雷达,我们自己做,它允许我们提供一个额外的冗余层,并且它也有优点,也是一个主动传感器,可以直接测量其他物体的多普勒速度,并且在某些其他条件下,比如非常浓雾或非常大的雨,它的降级不同且更平滑。它们都有各自的优点。我们的方法是使用所有这些东西。这样你就有冗余,并且可以提高系统的性能。
今天我们部署了第五代传感器,并正在努力部署第六代。在这些代际中,我们提高了可靠性,提高了能力和性能,并大幅降低了成本。对我们来说,使用所有三种模式非常有意义。如果你正在构建一个驾驶辅助系统而不是一个完全自动驾驶的车辆,你可能会做出不同的权衡,因为那最后的0.001%真的是非常重要。
David George:我们从早期的LLM浪潮中观察到,已经出现了一场巨大的成本降低竞赛。许多人认为这是一种商品化过程,尽管还处于早期阶段。而多年来,我们对自动驾驶的观察恰恰相反。这个领域的人越来越少。事实证明,它比预期的要困难得多。你能谈谈为什么会这样吗?
Dmitri Dolgov:它们总是具备这个特点,开始很容易,但要达到完全自主驾驶,不需要人来驾驶员是非常困难的。也许有几个因素促成了这一点。一个是,与LLM和数字世界中的AI相比,你必须在物理世界中操作。物理世界是混乱的,它是嘈杂的,它可能会让人感到无足轻重。如果你愿意的话,有各种不确定性和噪音可以把你拉出分布。
David George:当然。
Dmitri Dolgov:这是让这件事变得非常困难的一点。其次是安全。在某些领域,这些AI系统是创造性的,这很棒。但在我们的领域,错误的代价非常严重,对吧?
David George:是的,没有容错。
Dmitri Dolgov:这把标准设置得非常高。最后一点是,你需要实时运行,你把这些系统放在快速移动的车辆上,毫秒都很重要。你必须非常迅速地做出决定。所以,我认为正是这些因素的结合导致了你看到的趋势。你必须在这方面、那方面和另一个方面都表现出色。这是所有因素的综合。系统每个组件以及如何将它们组合在一起的标准都非常高。有很大的进步推动着系统前进。但是这没有灵丹妙药,如果你谈论的是完全自主,就没有捷径。
David George:由于对错误的零容忍,你对安全有非常高的标准。监管机构对您有非常高的负担。你知道,通过所有这些过程成本很高。我很感激你们能够坚持下来,尽管你们一路经历了许多挫折经历。
Dmitri Dolgov:这是一个漫长的旅程,但对我和Waymo的许多人来说,看到它最终成为现实是非常激动人心和非常有意义的。现在我们在许多背景下谈论安全和AI,这是一个大问题。我们在物理世界中应用AI,目前我们有相当有力且不断增长的证据表明,我们正在看到切实的安全效益。这非常令人兴奋。
从早期弯路中习得经验
David George:我总是对人们说,这是一段漫长且代价高昂的旅程,但这可能是今天我们能看到的最强大的AI体现。我的意思是,你可以坐进一辆没有驾驶员的车,而且它比人类驾驶还要安全。这太不可思议了。在这一过程中,有哪些挫折经历?
Dmitri Dolgov:在那些早期的日子里,头几年?
David George:早期的日子。
Dmitri Dolgov:我记得有一次,我们规划了一条路线,从蒙特维迪亚开始,然后经过帕洛阿尔托,穿越山脉到达1号公路,再沿着1号公路到旧金山。我们在城市里绕了一圈,最后在伦巴底街结束。那是在2009年,路线非常复杂。
David George:全程有100英里,对吧?我想即使是人类驾驶员也无法完成这个任务。
Dmitri Dolgov:确实。所以,有一天我们正在进行这个测试,我们在开车,刚刚通过了蒙特维迪亚到帕洛阿尔托的部分,我们在山里行驶,早晨有雾,我们看到前面的路上有物体。这些物体看起来像是路上的随机物品。有一个桶和一只鞋。然后在某个时刻,我们遇到了一辆生锈的自行车。我们问自己,“好吧,发生了什么事?” 最终,我们追上了它。我认为车处理得还不错,也许不是非常完美,但我们没有被困住。我们追上了一辆装满各种动漫好像哦的垃圾车,它不断地掉落东西,给汽车造成了障碍。
David George:这就像是一个卡通片,不断地向你们抛出异常情况。这真是太神奇了。最后一个问题,我会给你一个机会招人。我想借用你之前说过的话,我能看到你对创业的热情和兴奋。回忆那些日子真是太酷了。你对那些想要加入这个领域的人有什么建议,无论是公司类型、角色类型、行业还是其他什么?
Dmitri Dolgov:Waymo。
David George:我就是这个意思。
Dmitri Dolgov:你刚才说的正是重点。
David George:这很容易引导你回答。
Dmitri Dolgov:是的,我的意思是,今天我们在谈论AI,但这是一个重要的问题,一个对世界重要的问题,一个对你重要的问题。它很可能是一个难题。所以不要被未知的事情吓倒,不要被别人可能告诉你的事情吓倒,开始构建,然后继续构建,不要回头看。
David George:对你们取得的所有进展表示热烈祝贺。作为一个非常满意的客户,感谢你们的努力,我们非常感谢你们的到来。
———–END———–