包阅导读总结
1. 人形机器人、波士顿动力、电驱方案、技术挑战、应用落地
2. 本文主要讲述了人形机器人的发展现状,包括波士顿动力的Atlas转型电驱方案,人形机器人面临的技术挑战,以及其在工厂等场景的应用落地情况和未来发展趋势。
3.
– 人形机器人发展
– 波士顿动力Atlas的退役与电驱版上线
– 液压方案优缺点及商业化困境
– 电驱版Atlas的近况与优势
– 宇树科技的二代人形机器人及特点
– 人形机器人面临的质疑
– 丁汉和陶波指出存在技术挑战
– 傅盛和彭芳瑜对商业化表示质疑
– 人形机器人的需求逻辑
– 工厂成为首选落地场景的原因
– 进入工厂仍面临难度
– 小米对人形机器人发展的看法及进化所需数据
思维导图: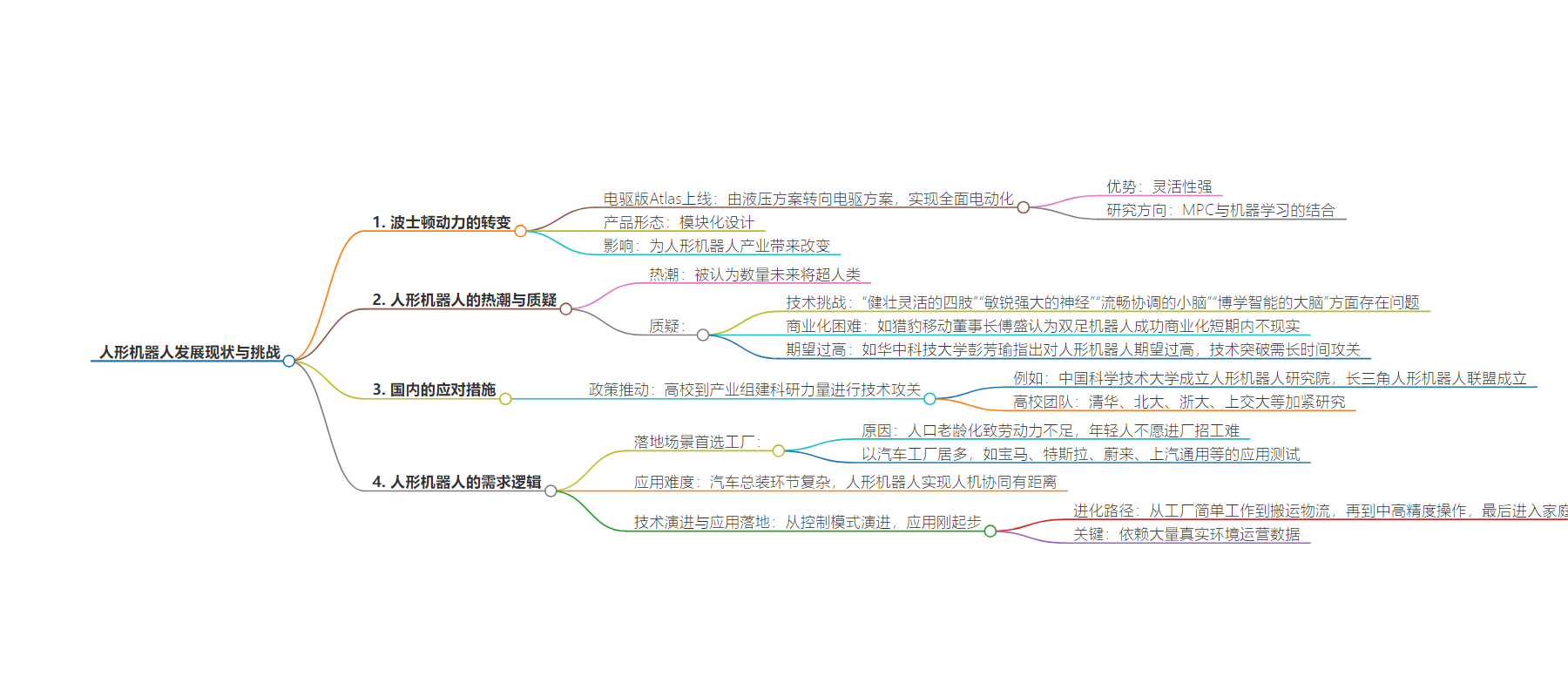
文章地址:https://mp.weixin.qq.com/s/KTOSVdqeGblUsG3baqGnfw
文章来源:mp.weixin.qq.com
作者:山竹
发布时间:2024/8/13 9:48
语言:中文
总字数:4032字
预计阅读时间:17分钟
评分:85分
标签:人形机器人,波士顿动力,电驱技术,商业化挑战,技术发展
以下为原文内容
本内容来源于用户推荐转载,旨在分享知识与观点,如有侵权请联系删除 联系邮箱 media@ilingban.com
今年4月的某一天,波士顿动力一如既往以视频演示方式,向全球公布了一个重磅消息:
那个会跑酷、跳舞、后空翻等各种花活儿的Atlas退役了!
仅仅一天后(美国时间),波士顿动力又公布了另一个重磅消息:
电驱版Atlas以另一种模块化形态,正式上线!
电驱版Atlas发布这三个多月以来,除了最初那个起身转头的视频外,官方并没有再放出更多视频,似乎是在憋一波大的。
2024年是人形机器人最热火朝天的一年,也是产品能力不甚明朗、追捧和质疑并存的一年。
追捧者认为,大模型为人形机器人带来了质变,再加上人口老龄化的需求,地球上人形机器人的数量未来将会超过人类。
质疑者认为,即便是有了大模型,人形机器人要进入社会环境高效工作,五年内仍不现实。
在每个产业受到广泛关注时,论战往往再所难免,但最终是由行动派证明论战中观点的真伪。
波士顿动力就是这样一个行动派,一个与特斯拉略显不同的行动派。
在人形机器人论战日趋激烈的这一年里,大家已经等不及波士顿动力这慢工出细活的劲儿,国外有网友经过一番搜罗,找到了一个电驱版Atlas的近况画面。
而电驱版Atlas近况,只不过是这一年藏在人形机器人产业浪潮下的隐秘之一。

电驱Atlas改命波士顿动力
波士顿动力,成立于1992年的美国网红机器人公司。
在人形机器人沉寂的那十年里,波士顿动力因流传于YouTube上的各类机器人“跑酷”视频赚足了眼球,但却因产品迟迟未能商业化,团队被几经转卖,先后经历了谷歌、软银、现代汽车(韩国)的时代。
由于电驱方案不够成熟,波士顿动力早年间的机器人以液压为动力。
液压方案的优点是动力够强、爆发力大、算法模型拟合度高,这是波士顿动力在视频中表现出的跑酷能力的基础。
但液压方案也有着明显的劣势,诸如噪音大、成本高等缺点,这直接导致了其在商业化道路上的坎坷不前。
一种说法是,软银孙正义点醒了波士顿动力团队——让他们适时转向了电驱方案,这也就有了2019年波士顿动力面向全球发售的机器狗Spot。

不过,当时的波士顿动力人形机器人依然在坚持用液压方案。
直到今年4月,电驱方案Atlas正式上线,宣告了波士顿动力全面电动化。
在波士顿动力全面电动化时,有业内专家告诉锌产业,这并不代表液压方案彻底退出历史舞台,未来液压+电驱的联合方案,有可能更有想象力。
不过,就大家关心的电驱Atlas,波士顿动力工程师Robin Deits在前不久的RSS 2024上给出了它的近况。
据Deits透露,波士顿动力电驱版Atlas延续了以往MPC(模型预测控制)算法,而且非线性MPC算法在电驱版Atlas上已经有了不错的表现。
例如,在真实环境中让Atlas做俯卧撑。
再如,在仿真环境中让Atlas做倒立。

波士顿动力认为接下来最重要的是MPC与机器学习的结合,这也是波士顿动力正在研究的方向。

人形机器人的这波热潮,以及波士顿动力向电驱方案的方向转变,是波士顿动力的一次逆天改命。
要知道,如果按照波士顿动力原有发展来看,很难想象这样的烧钱项目还能撑多久,是否还有人愿意为他们提供技术研究经费。
而就波士顿动力转向电驱方案来看,新推出的Atlas的形态超乎想象采用了模块化的设计,在此之前,大家想象中的人形机器人,都是类似特斯拉Optimus的样子。
这样的模块化人形机器人方案有什么优势呢?
从这款产品的发布视频来看,灵活性是它最大的特性,近乎变态的灵活性让它可以直接从地面上爬起来,甚至头和关节都可以大幅度旋转。

实际上,就在波士顿动力这款电驱Atlas发布一个月后,国内人形机器人明星企业宇树科技也上线了他们的二代人形机器人,宇树G1。
从产品形态上来看,宇树G1同样采用了模块化设计,全身23个自由度,重约35kg,身高约为1.3m,更重要的是,宇树G1对外售价9.9万元,直接将人形机器人打到了10万元以内。

宇树科技创始人王兴兴就曾表示,“波士顿动力发布他们电驱版Atlas时,我们非常高兴,因为我们当时在做的新方案和他们的非常接近,波士顿动力做人形机器人已经有十几年,他们选的路线不会差。”
尽管宇树科技此前发布的人形机器人H1已经学会了后空翻,也学会了跑步、跳舞,甚至这次将人形机器人售价打到了10万元以内,但王兴兴依然觉得,人形机器人领域还有很多问题有待解决。
“深度学习模型框架还有很多问题(例如通用性不够强),端到端的感知和规划也还有很多工作待解决……”
实际上,就在人形机器人风头正盛、一些人觉得人形机器人即将步入人类社会时,也有这样一些人,他们提出了问题,甚至是质疑。

被质疑的人形机器人
7月16日,中国科学院院士丁汉和华中科技大学教授陶波在《人民日报》发表了联合署名文章,文章中指出:
虽然人形机器人的科学原理不断清晰明朗,但在“健壮灵活的四肢”、“敏锐强大的神经”、“流畅协调的小脑”、“博学智能的大脑”四个方面依然存在技术挑战,需要勠力攻克。
以机器人的四肢为例,运动控制算法是大部分团队研究人形机器人最先涉足的领域,关于这一领域的研究也已经长达数十年,然而,现有的一体化关节,也仅仅是能够支撑人形机器人进行一些简单的跑、跳、搬运动作。

要想像人类动作一样丝滑运动、实现更高精度的控制,就需要继续在电、磁、热、机械等多维度上进行物理设计优化。
实际上,最近已经有不少科技领域从业者对人形机器人这波热潮提出了质疑。
猎豹移动董事长兼CEO傅盛最近在参加《中国企业家》杂志社主办的活动时就表示,“今天人形机器人很火,但是我对双足机器人能成功商业化不是很看好,作为科研项目是可以,如果落地到产线上工作,没有三五年就不可能。”
要知道,猎豹移动曾在2018年跨界连发五款面向不同领域的机器人而备受争议,然而,在这次人形机器人热潮中,我们却没有看到猎豹移动直接下场。

华中科技大学机械科学与工程学院副院长彭芳瑜在近日的科技创变者大会上也指出:
“现在大家对人形机器人的期望太高了,以为可以像工业机器人、甚至和高端装备一样,高精度、高可靠、高效率,还要足够灵活,这是非常困难的。”
人形机器人强在通用性、灵活性和协作性,但是载荷和精度要比工业机器人差一些,工业机器人的精度又比高端装备要差两个数量级。
然而,要进入工厂从事复杂工作,往往对载荷、精度有很高的要求,现在的人形机器人要在这两个方面有进一步突破,还需要很长时间来做技术攻关。

面对这些质疑和问题,国内在相关政策推动下,从高校到产业,已经组建起了不少科研力量进行技术攻关。
例如,就在前不久,中国科学技术大学成立了人形机器人研究院,丁汉院士受聘为首任主任,受聘仪式上,一并宣布的还有长三角人形机器人联盟的成立。
实际上,包括清华、北大、浙大、上交大等国内顶级高校,都已经有相应团队在加紧人形机器人领域的技术攻关,联合产业进行产业验证。
在人形机器人产业验证过程中,人形机器人进工厂是2024年的另一个热门趋势。
 人形机器人的需求逻辑
人形机器人的需求逻辑
8月6日,被OpenAI青睐的Figure官宣发布了二代人形机器人,Figure 02。
Figure 02身高1.67m,体重70kg,有效载荷20kg,续航5小时,内置6个视觉传感器,内置了VLM等模型,机载算力也提升了三倍。
更直观的是,内置线缆让这代机器人看上去更完整,也更圆润了。
这些是Figure 02在产品层面的改变,在应用层面,这代机器人被宝马用到了美国斯帕坦堡工厂,先行测试一些简单的搬运和安装工作。

不过,Figure官方指出,由于采用了人工智能算法,整个搬运和放置过程实现了100%自动化。
实际上,不只是Figure 02,目前国内外大部分人形机器人团队首选的落地场景都是工厂,这其中又以汽车工厂居多。
例如,特斯拉Optimus在自家工厂的(测试)应用,优必选Walker S在蔚来工厂的(测试)应用,傅利叶GR-1在上汽通用工厂的(测试)应用……

为什么人形机器人会首先选在工厂进行落地应用?
一个简单的逻辑是,人口老龄化导致年轻劳动力不足,再加上现在的年轻人不愿意进工厂导致的招工难,这就导致了不少工厂正在面临或即将面临工人供需失衡的问题。
在不少年轻人看来,跑滴滴、跑外卖成了比进厂打工更容易的事。
本就自动化程度较高的工厂,对人形机器人接受程度相对也更高,自然也就成了人形机器人的首选场景。
尽管如此,人形机器人要想真正进入工厂,依然有难度。
戴盟机器人首席科学家王煜(也是香港科技大学机器人研究院创始院长)指出:
“汽车制制造业分为四个工艺流程:冲压、焊接、涂装、总装,前三个流程通过高端装备和工业自机器人,自动化程度已经达到了80%-90%,最复杂的总装环节自动化程度还只有20%-30%。
在总装环节,工人要用手操作机器,有时还要钻到汽车里,要拧螺丝、敲敲打打,还要与其他工人配合,还要做检测。
人形机器人要用到总装环节,要有一定的智能,要能感知环境,还要能在这样的环境中实现人机协同。
虽然现在人形机器人的功能看上去已经很不错了,但要真正用到汽车总装车间还有一段距离。”
从技术演进来看,人形机器人在过去半个世纪里经过了无模型控制、运动学模型控制、动力学模型控制阶段,走到了现在更接近人类控制模式的人工智能模型控制阶段。
从应用落地来看,人形机器人其实才刚刚起步。

小米现在无论在电动汽车、智能工厂,还是人形机器人上,都干得风生水起。
以人形机器人控制精度的逐步提升过程视角,小米机器人事业部总经理许多在科技创变者大会上也指出:
“人形机器人会从工厂中的简单分拣、上货,逐渐进化到适用于搬运、物流场景,再到工业中的中精度、高精度操作工作,最后再到进入家庭。”
在人工智能模型控制阶段,这样的进化有赖于大量数据,尤其是真实环境中人形机器人运营的数据。
这也是为什么,包括波士顿动力在内的团队都在通过遥操作来进行人形机器人数据采集的原因。
不难想象,当初被各种“误解”的Mobile ALOHA,或许才是现阶段人形机器人产品进化过程中,一门最好的生意。